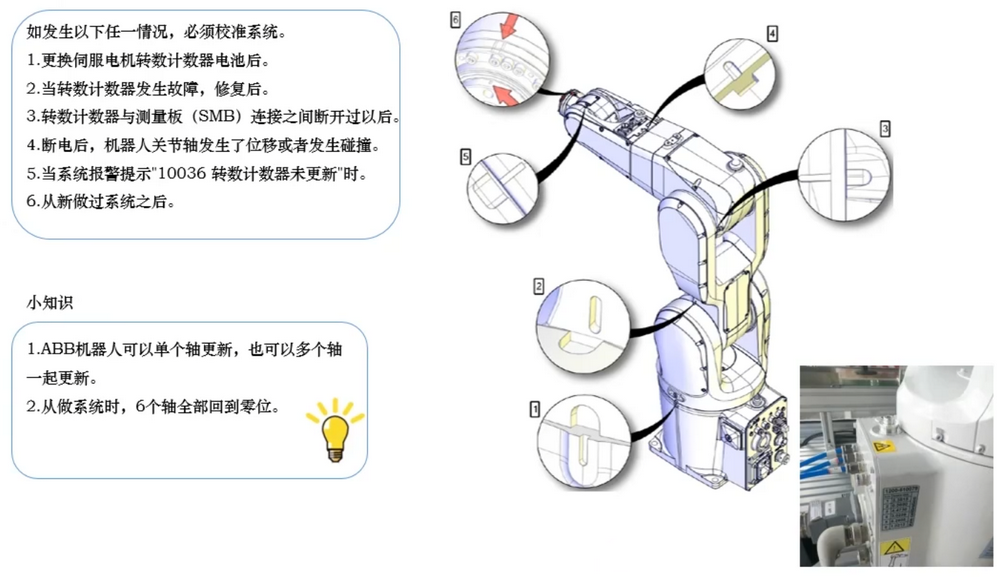
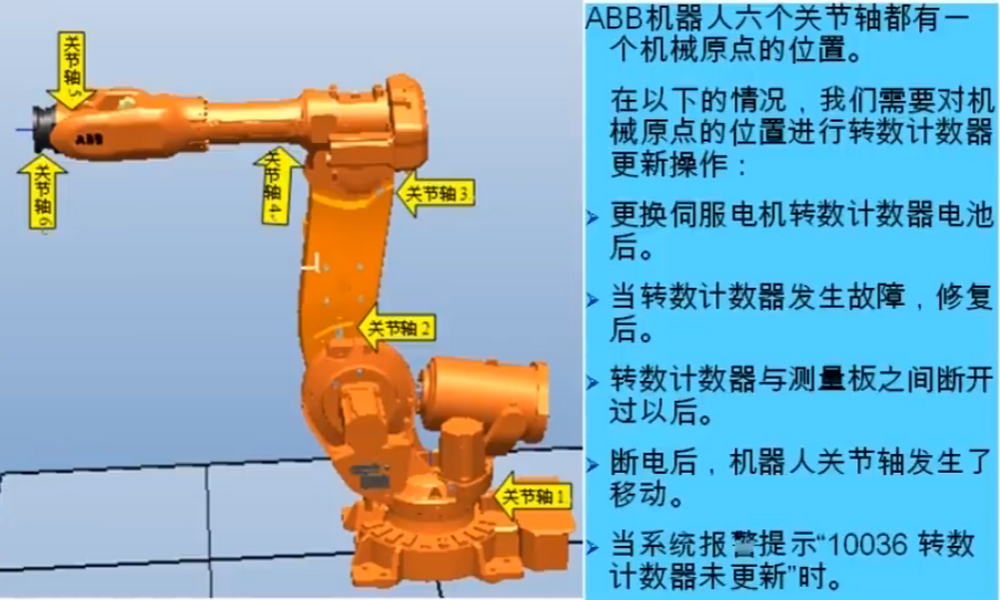
ABB机器人六个关节轴都有一个机械原点的位置。当发生以下情况时需要转到手动操纵使用单轴运动的方式,让其回到每一个关节轴的机械原点处。以及完成相关的更新操作。

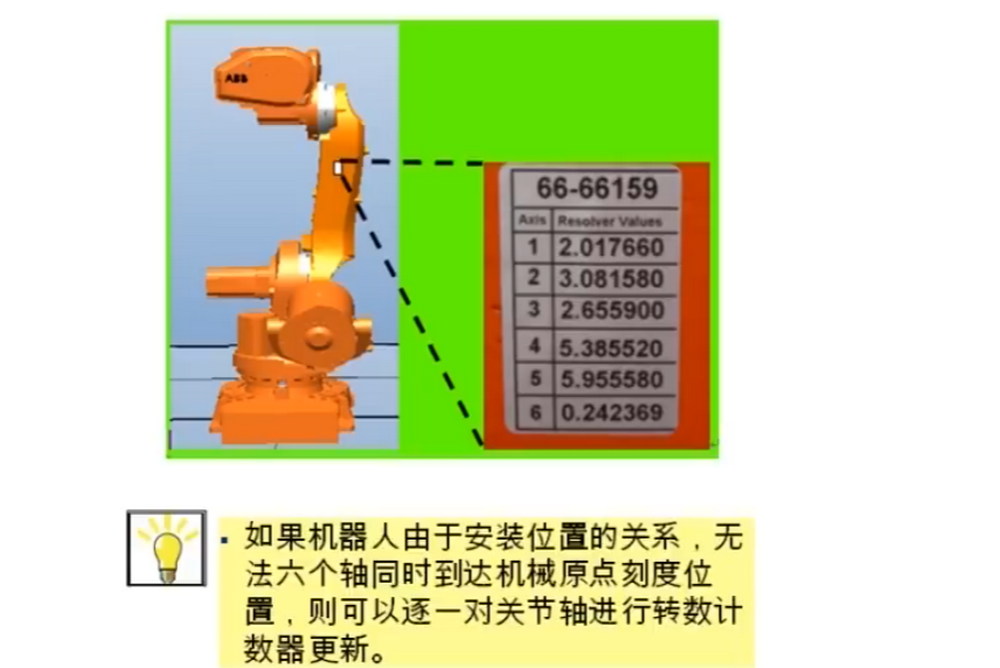
ABB机器人转数计数器偏置数据
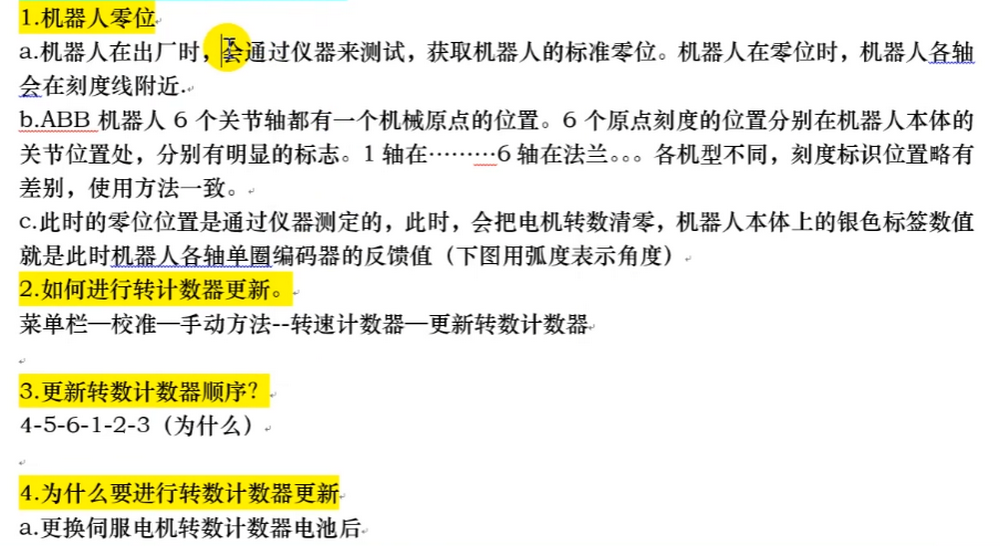
按照456123轴的原则来手动操纵使每个轴都归零。
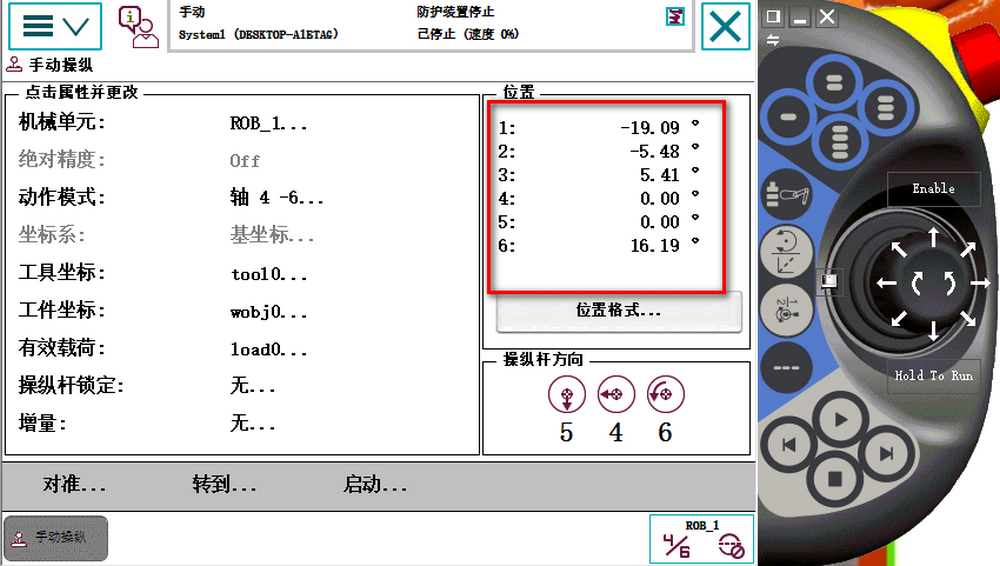
在使用手动操纵使各个轴回到机械原点后,要对数据进行更新。

选择校准
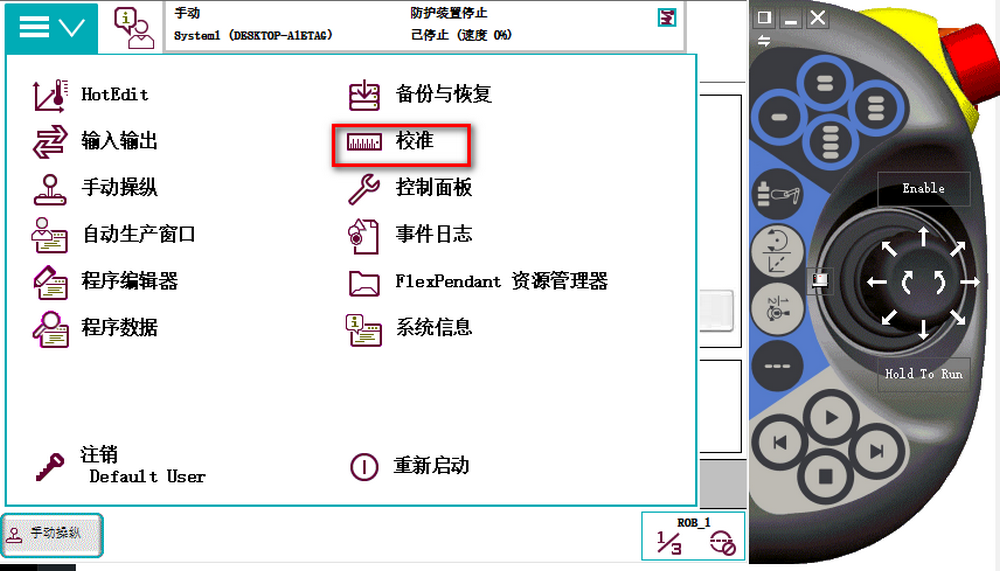
选择校准,校准参数
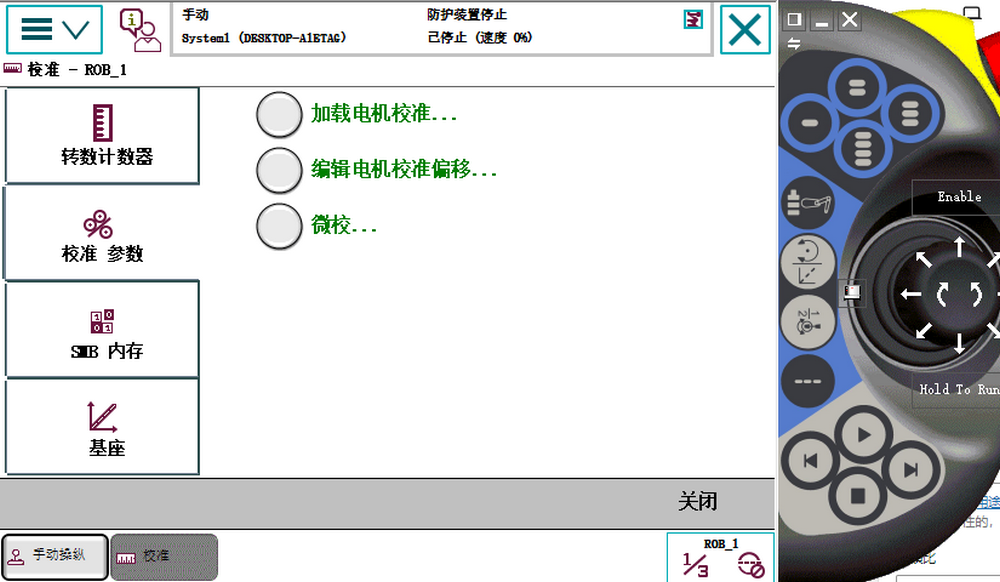
点击”编辑电机校准偏移”,此时查看2轴上标签数据与示教器编辑电机校准偏移是否一致,如果不一致要把标签上的数据更新到示教器编辑电机校准偏移里来。

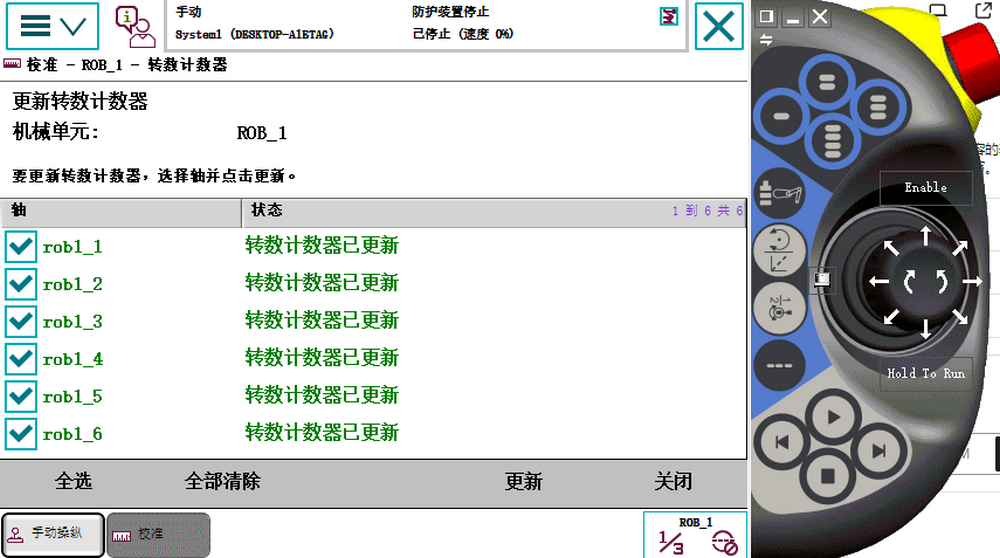
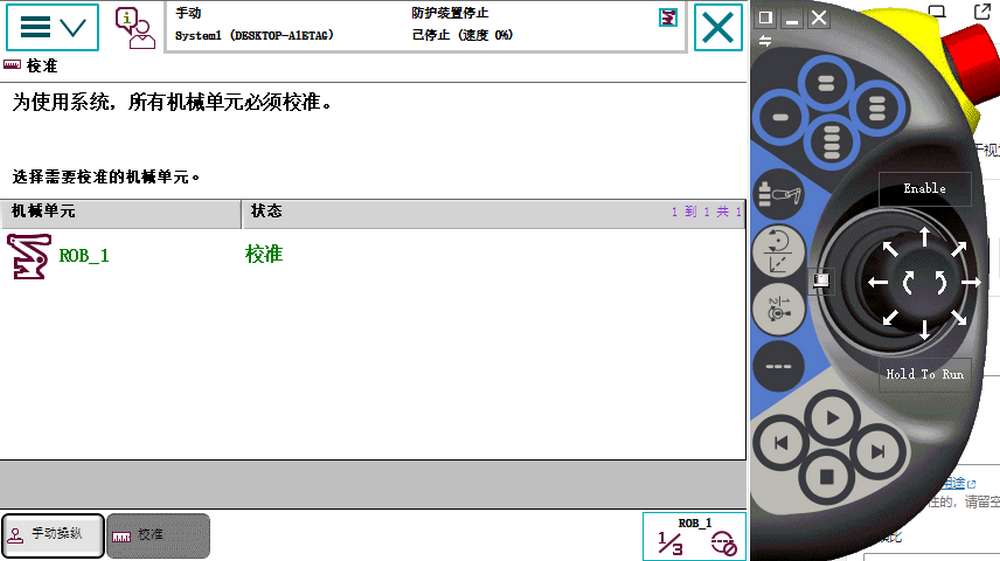
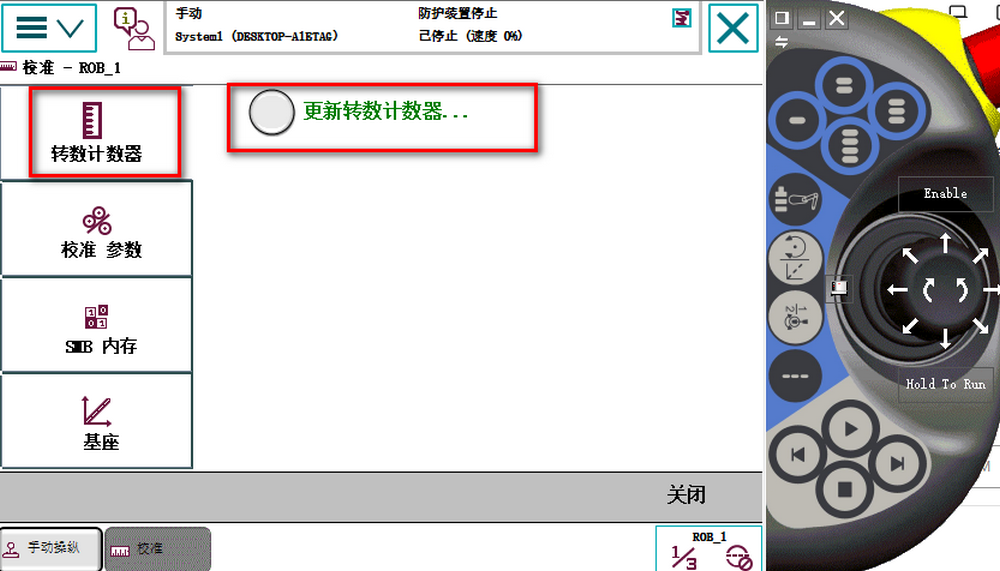
点击”更新转数计数器”
把所有的机械单元都选中。并点击更新。
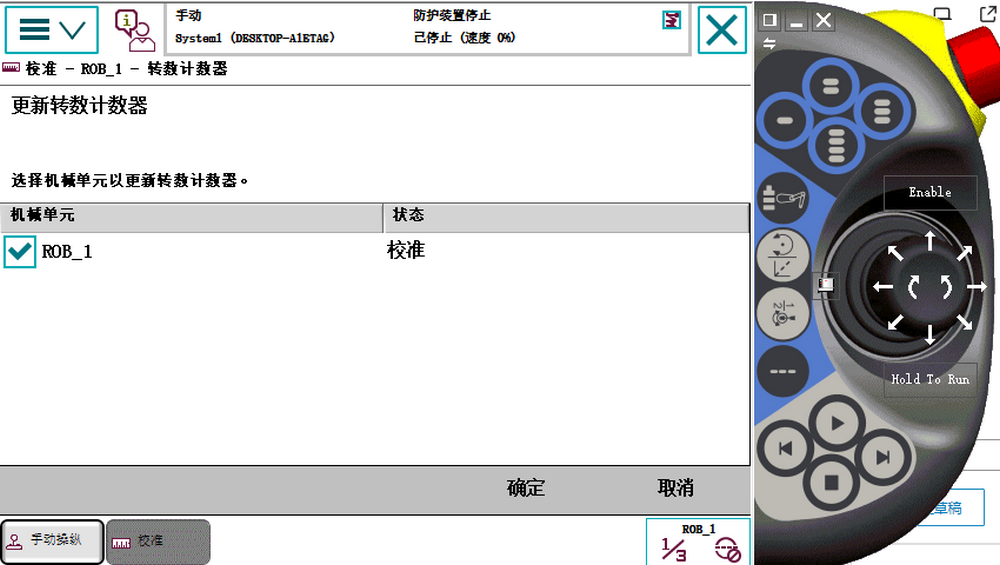
手动操作机器人让每个轴都对准刻度线,然后选中所对准的轴,然后点击更新。更新时电机不要上使能,也就是Enable是关闭的,也就是手不要按住使能按钮。