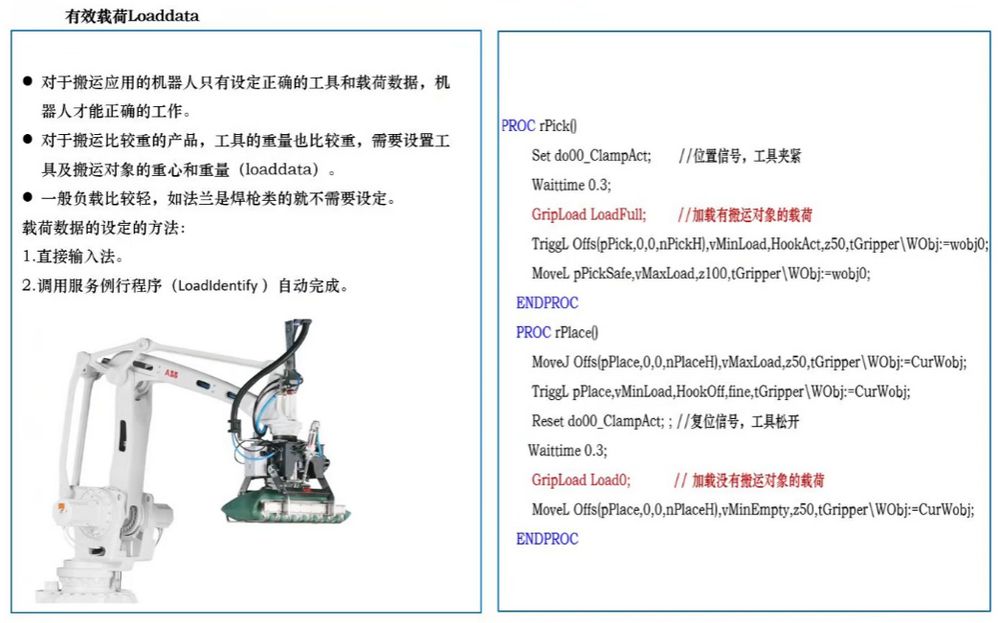
有效载荷Loaddata的设定。对于搬运应用的机器人,应该正确设定夹具的重量,重心Tooldata以及搬运对象的重量和重心数据Loaddata。
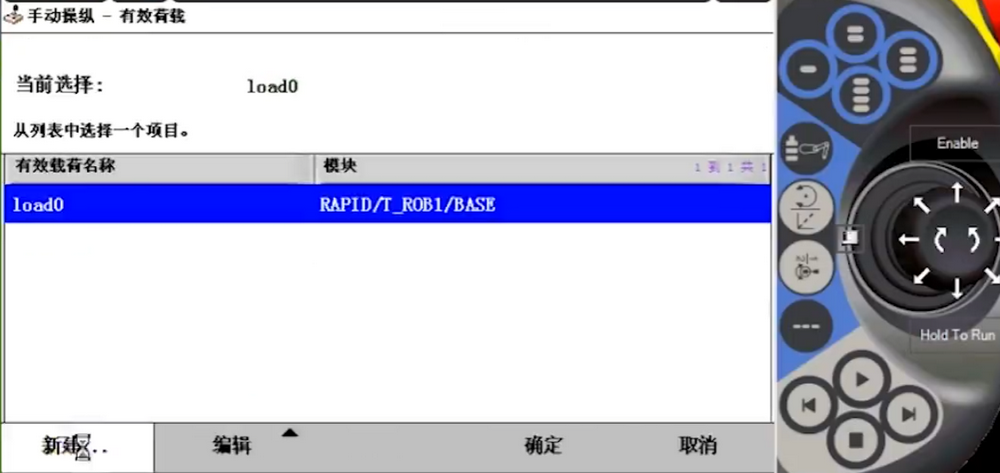
手动操纵—-有效载荷—–新建
新建一个载荷load1—–初始值。
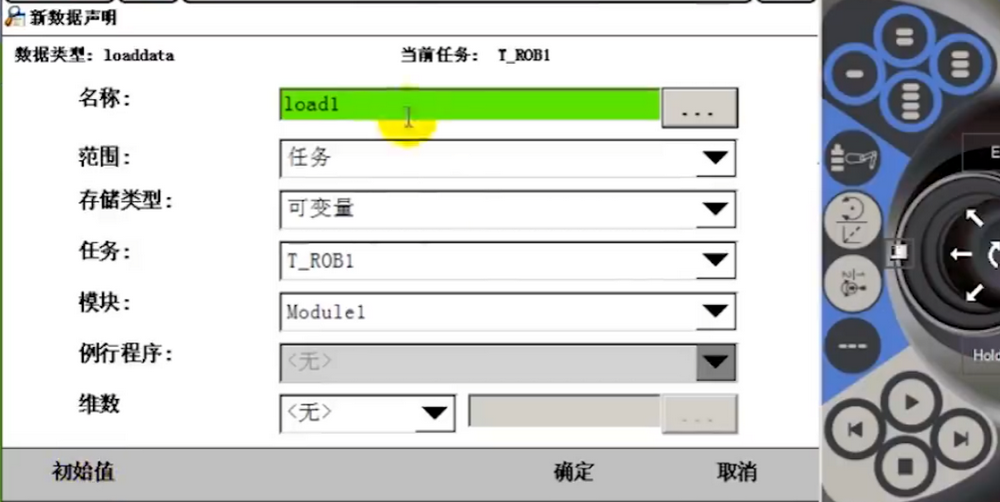
比如重量是40kg,重心偏移为350mm, 然后点确定。

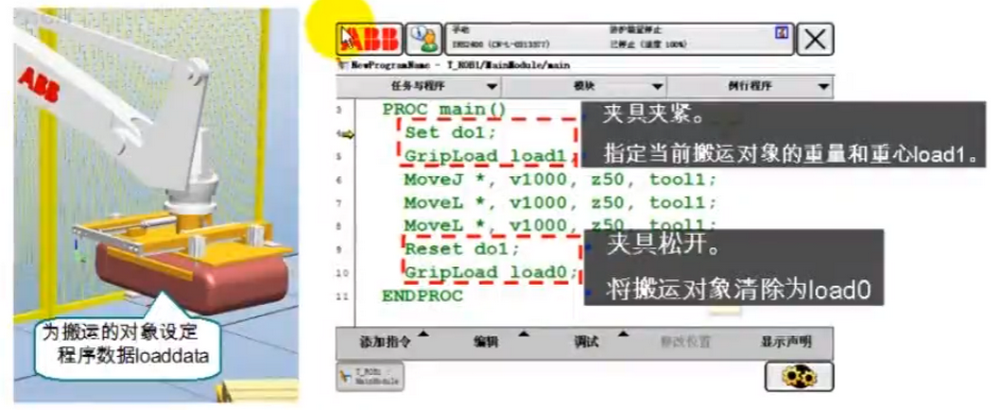
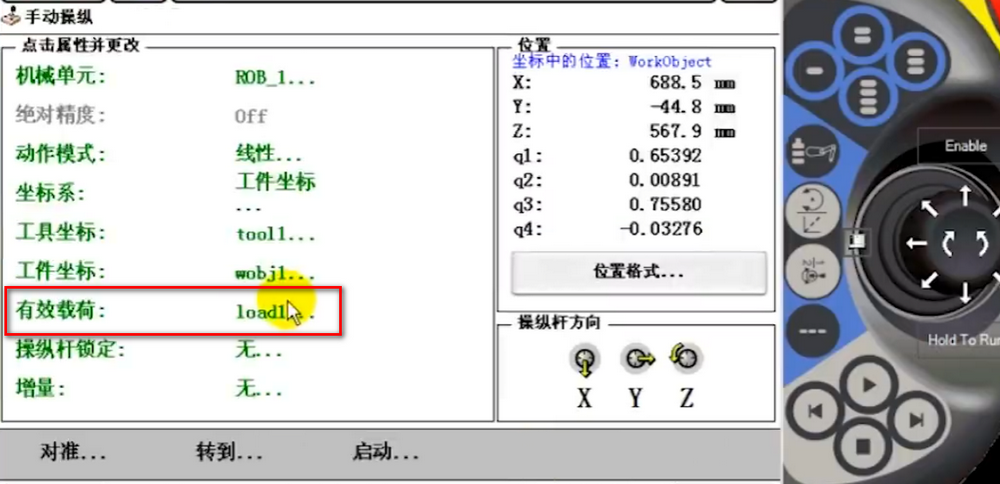
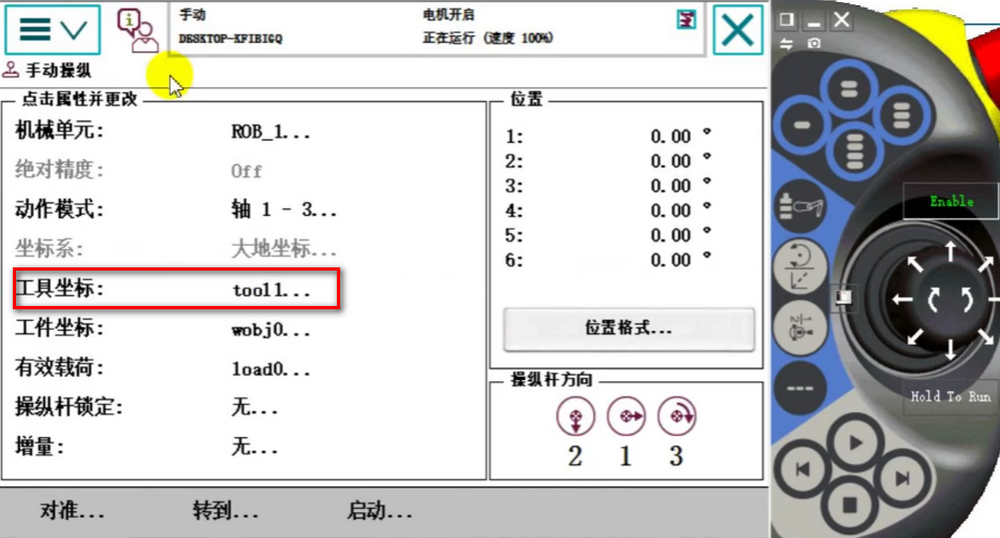
点确定以后,如果要是机器人应用就选择这个有效载荷load1。如果夹具松开了就选择load0,可以使用指令编程来选择load1还是load0
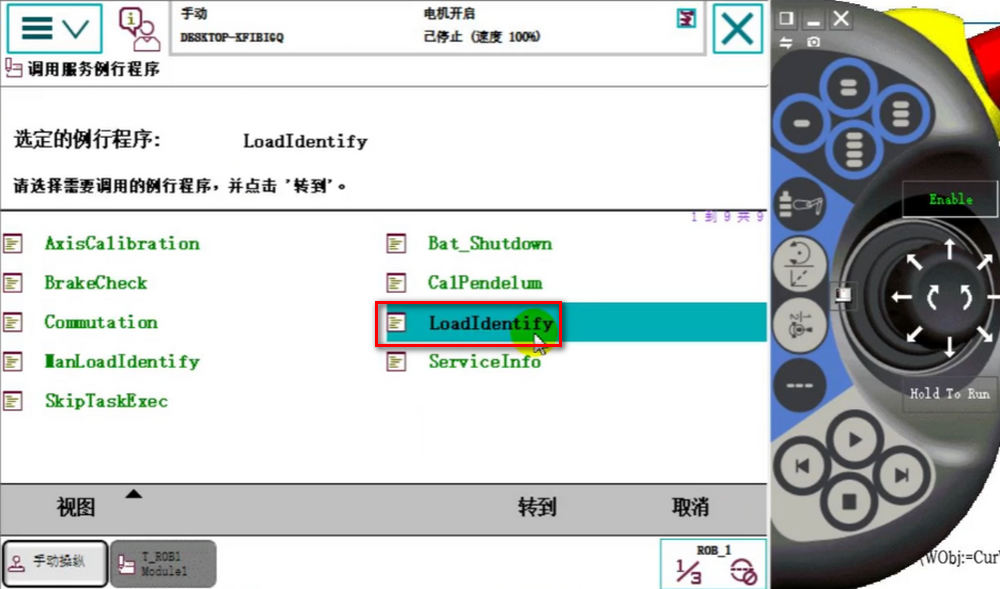
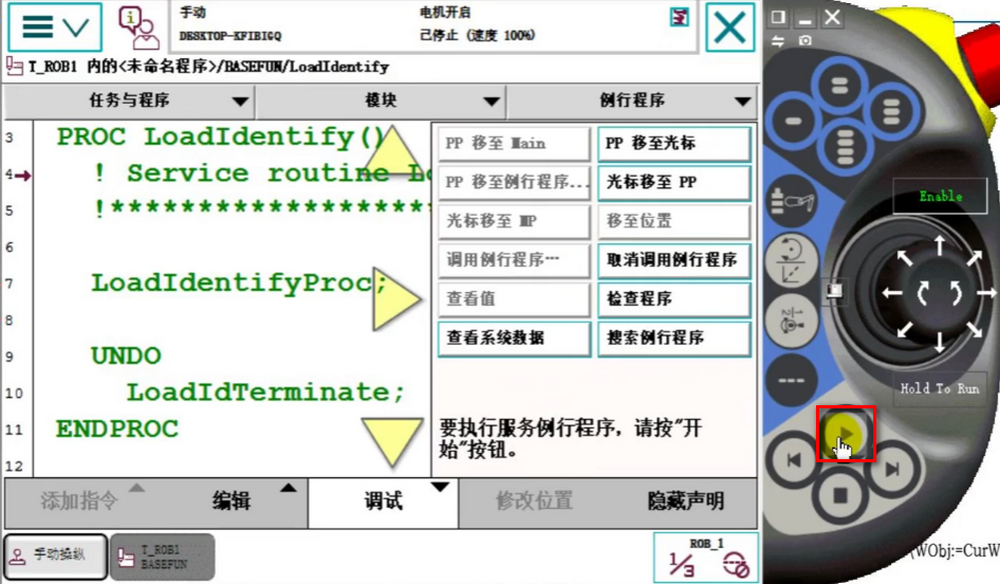
调用服务例行程序LoadIdentify自动完成有效载荷的设定。
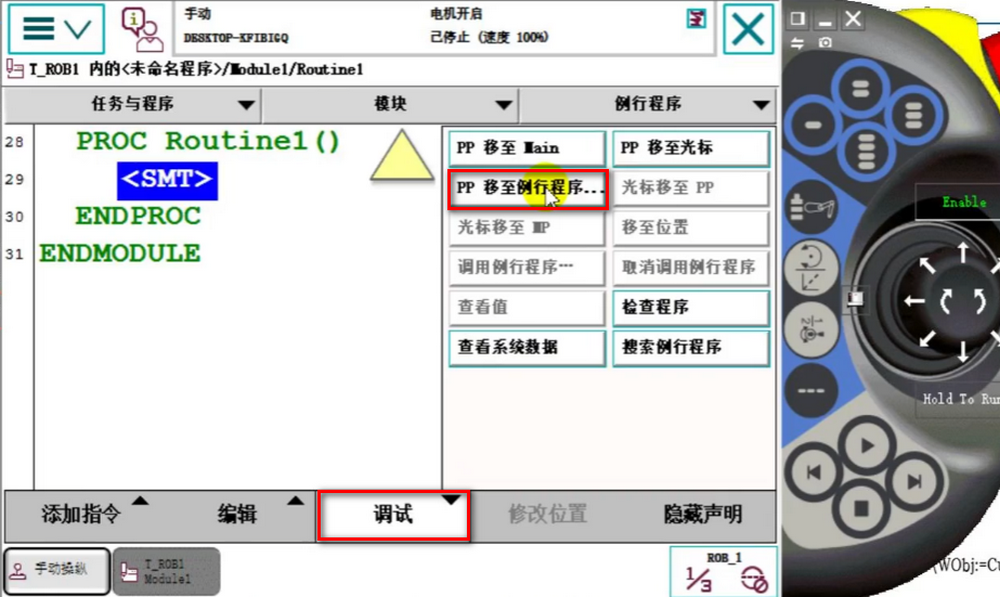
打开一个例行程序—–调试——PP移至例行程序—-确定。
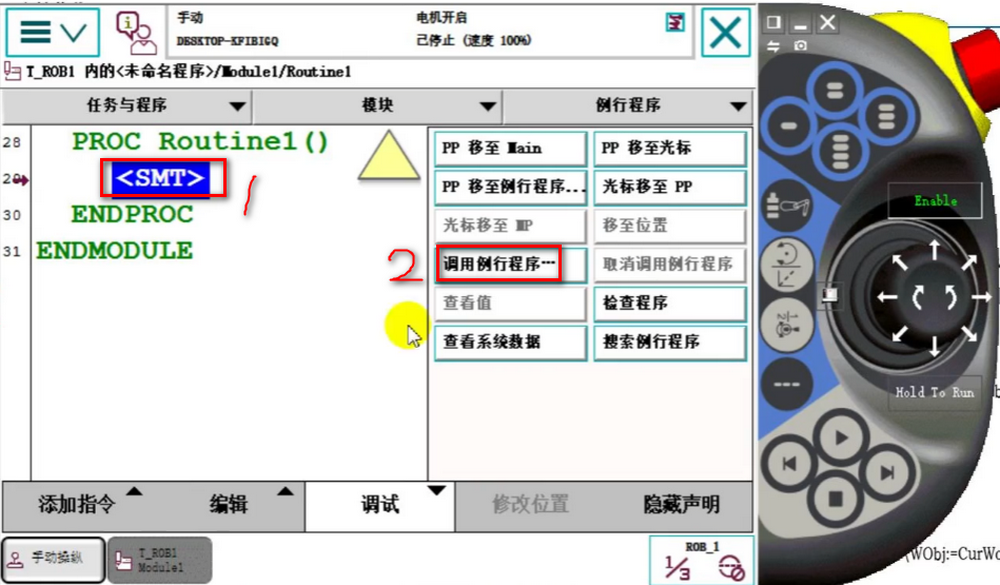
选中占位符<SMT>—-调用例行程序…
点击LoadIdentify程序——转到
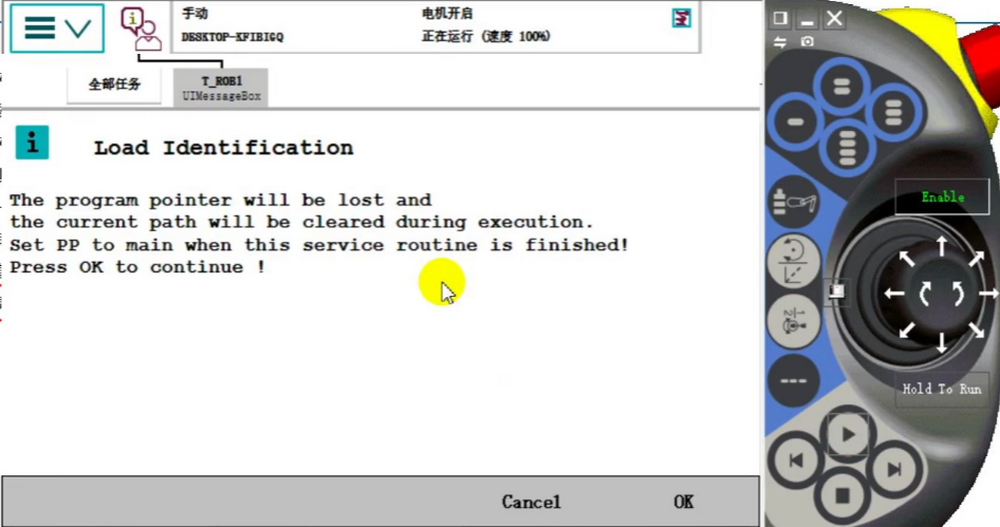
在手动模式下点击开始。
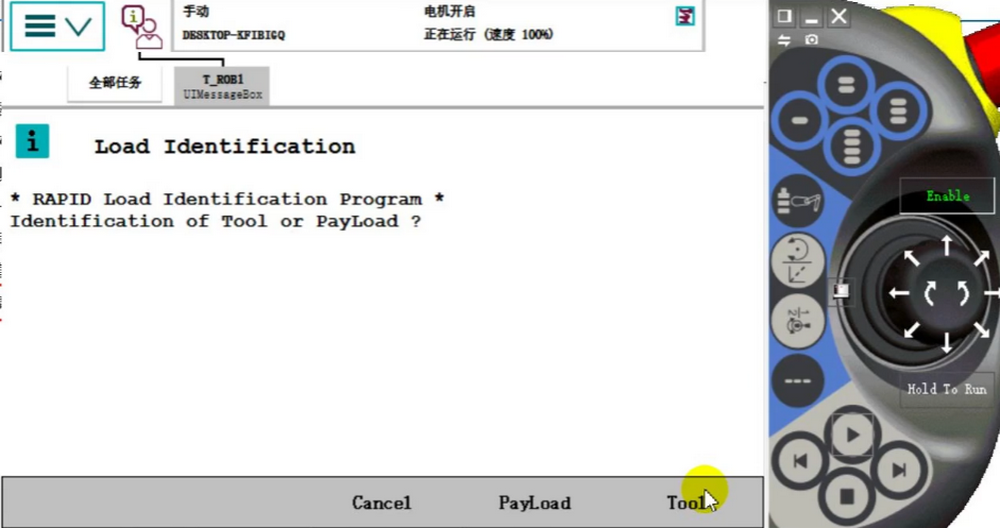
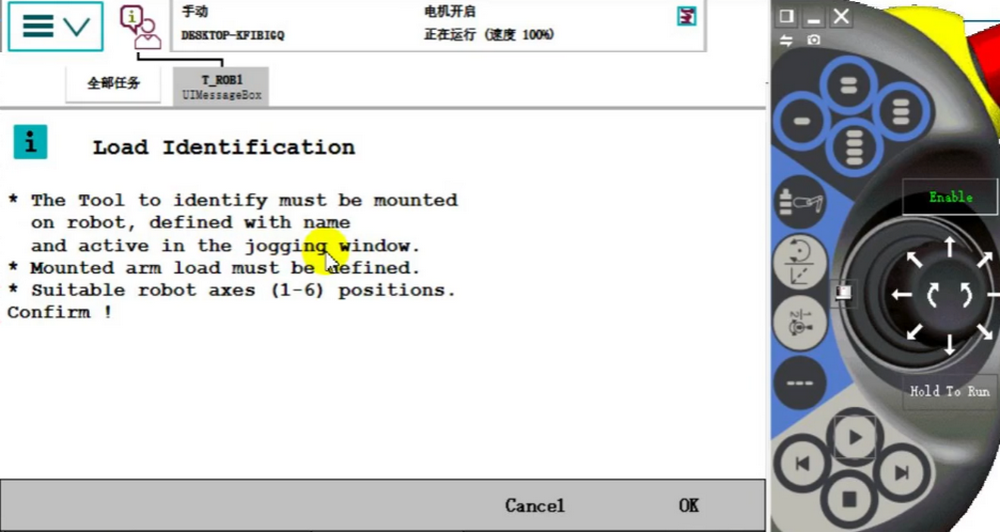
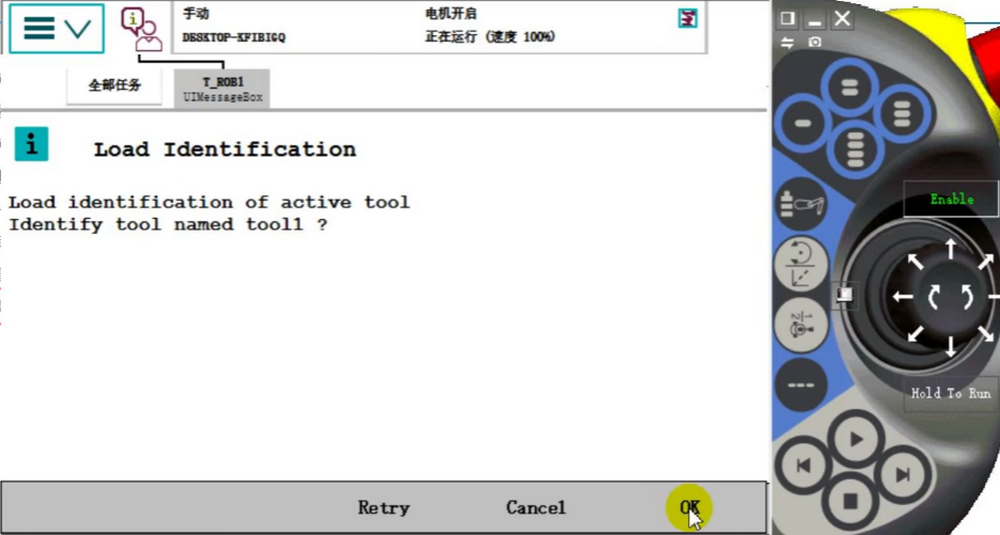
此时就提示载荷的识别了。按向导操作。
是进行测算工具的载荷还是工具加上对象的载荷。
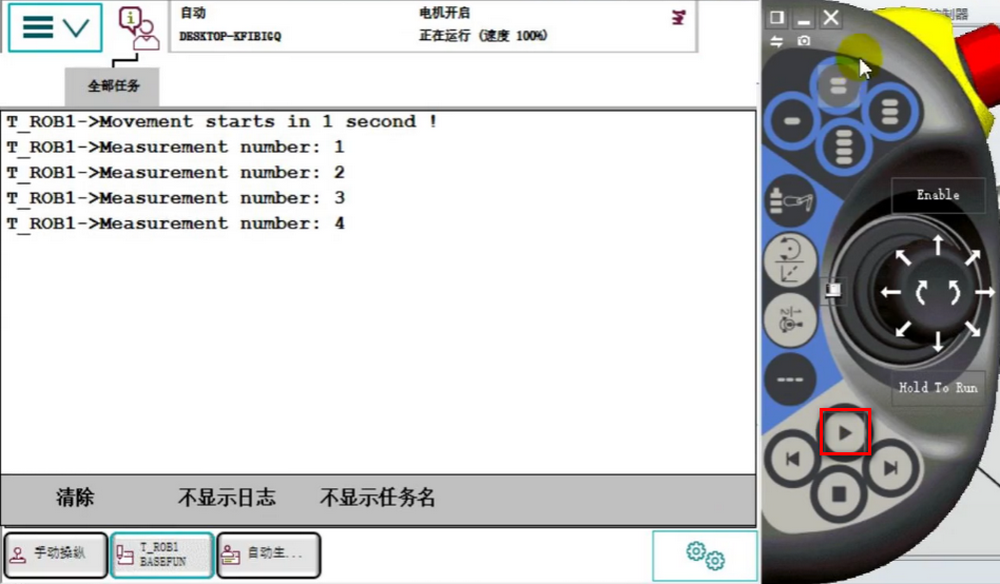
将模式开关调到自动—–然后再回到LoadIdentify实例程序—-开始。
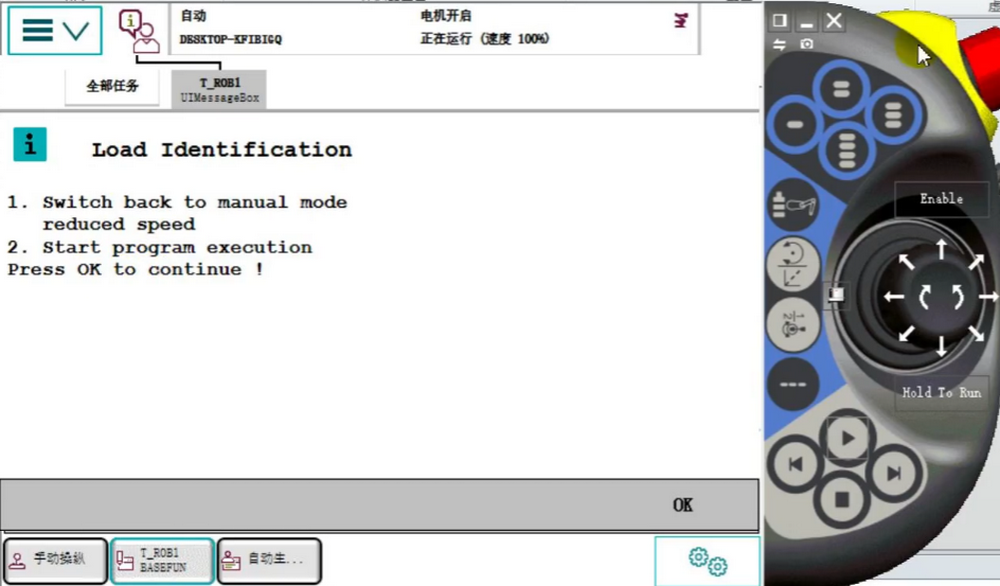
再将模式开关调到手动——点开始—–按向导操作。
真实的ABB机器人手动/自动切换不在示教器上而在主机上,可以用钥匙旋转来切换手动,自动,全速。电源上电,急停都在主机箱上。
