得先定义工具数据,然后再定义工件数据,因为如果没有定义工具数据的话,那么tool0是在法兰盘上,这样TCP就是法兰中心点,再在工件上坐标数据是没有意义的。
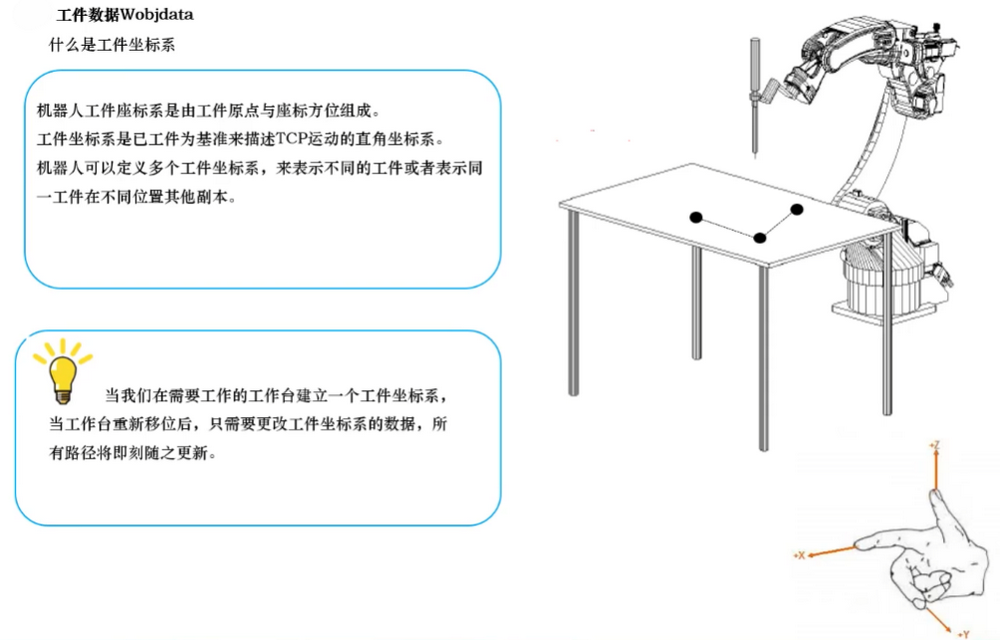
工件坐标wobjdata的设定1
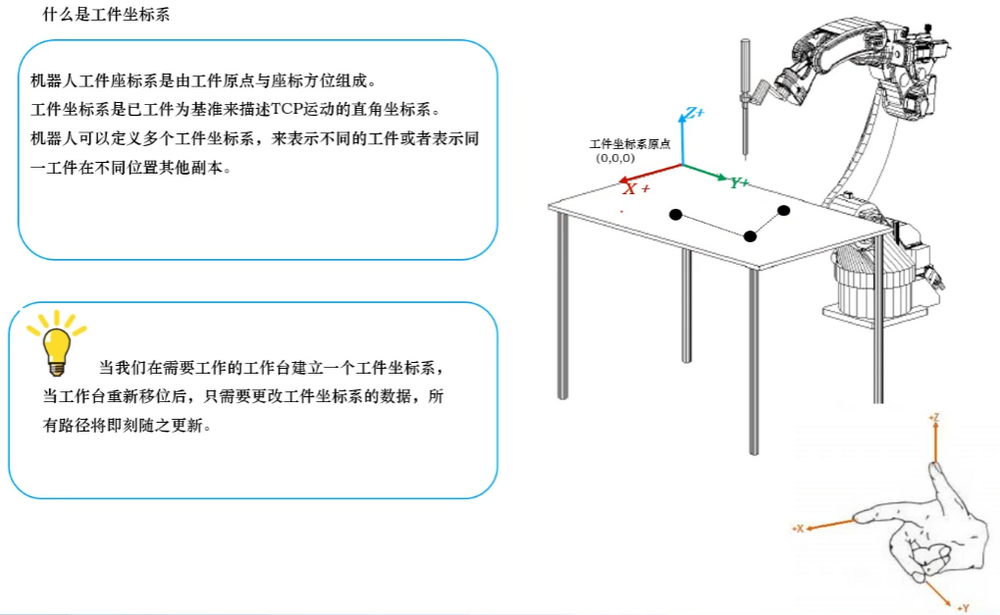
工件坐标wobjdata的设定2
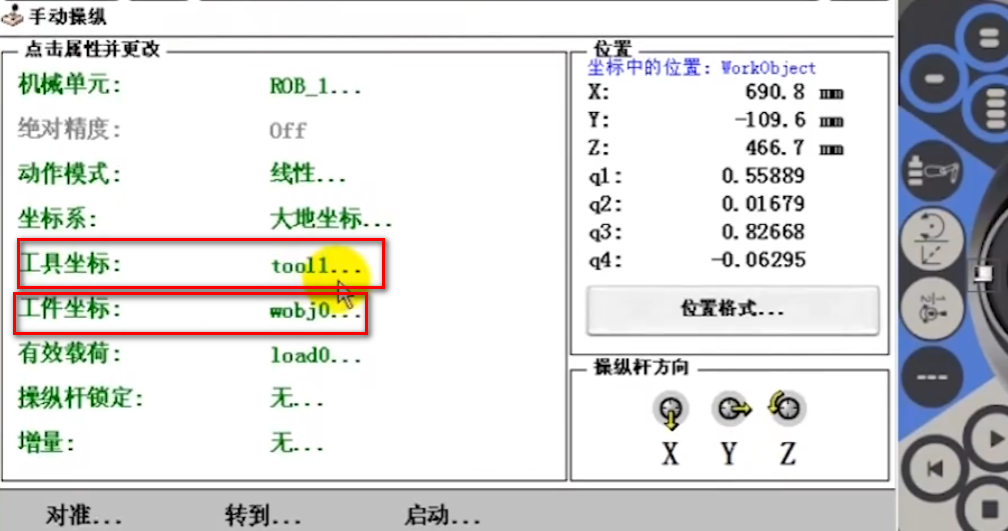
在手动操纵—坐标系中选择“大地坐标”

工具坐标选择tool1,然后点击工件坐标。
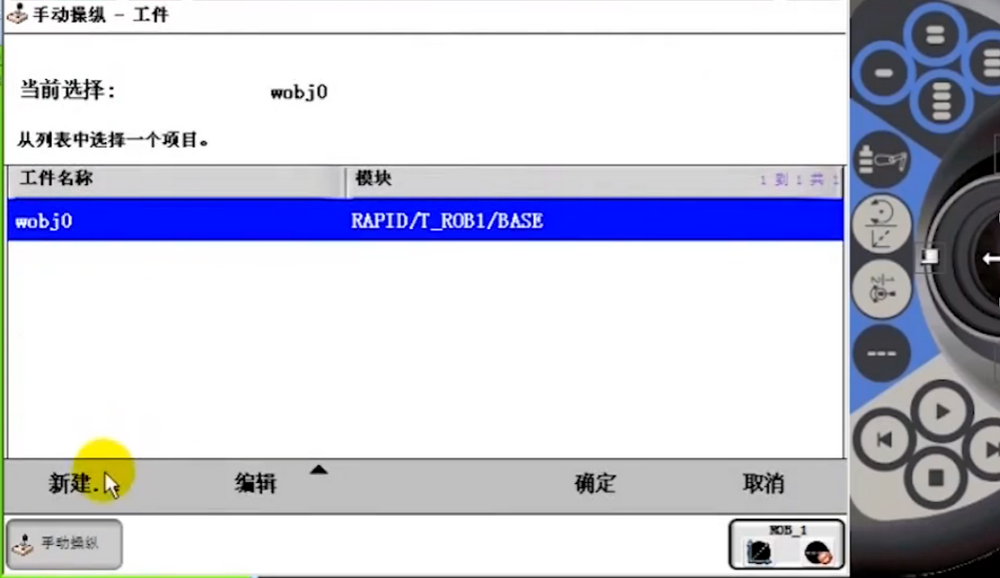
在工作窗口中点新建。
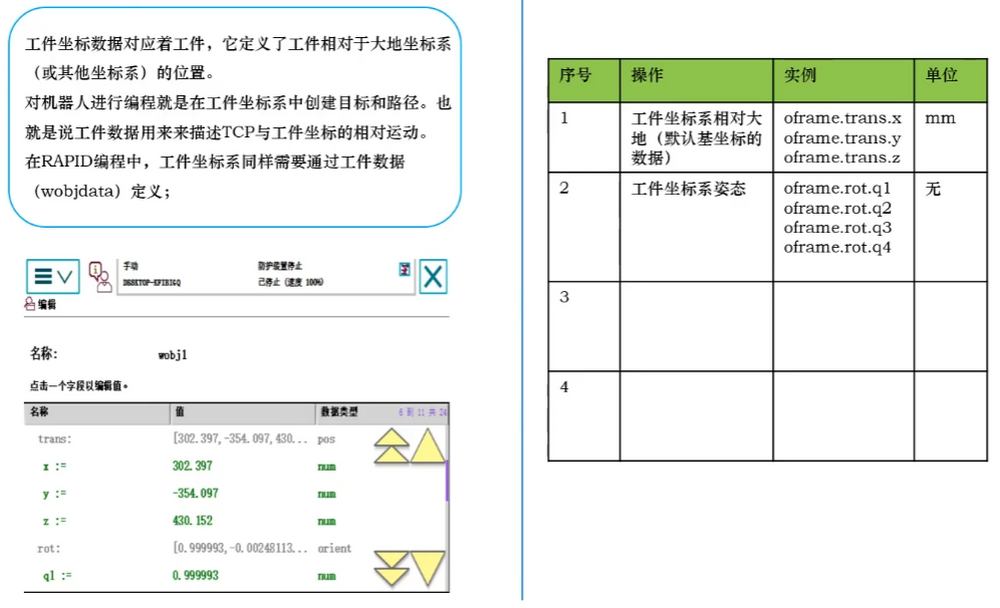
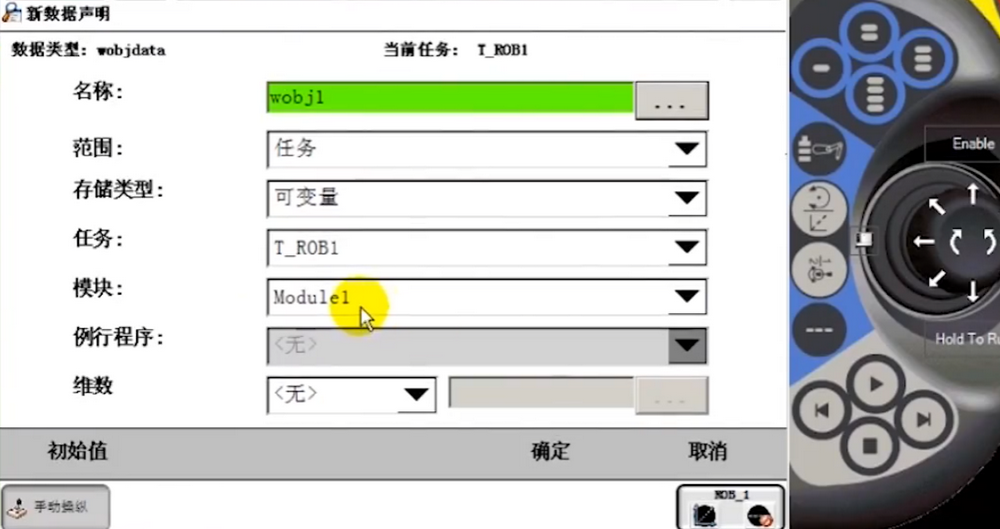
填写相关数据信息。再点确定。
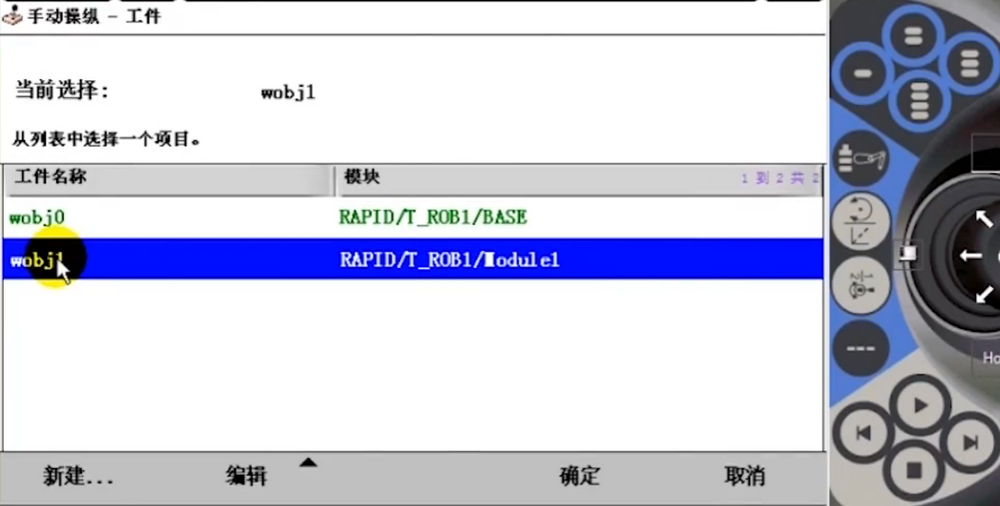
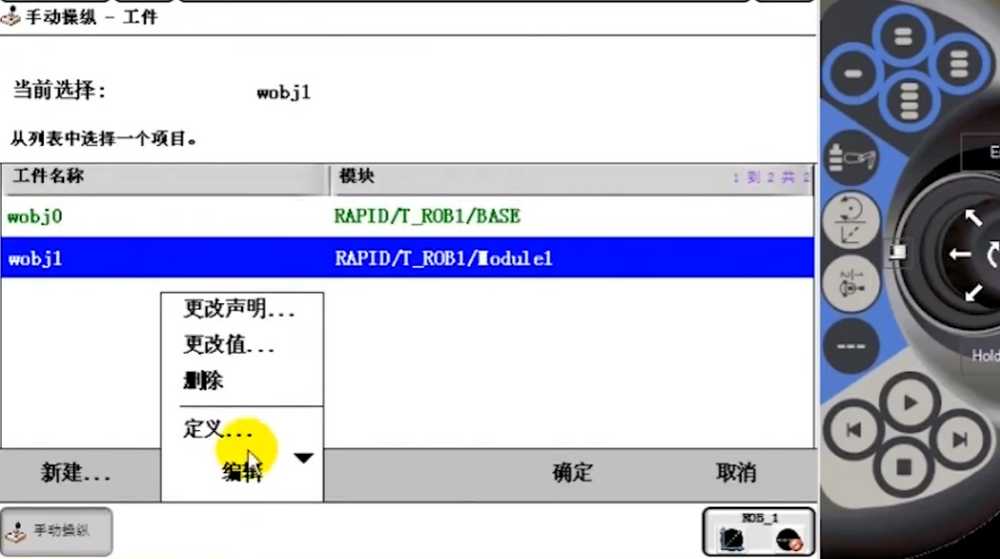
选择刚新建的wobj1——点编辑——–定义…
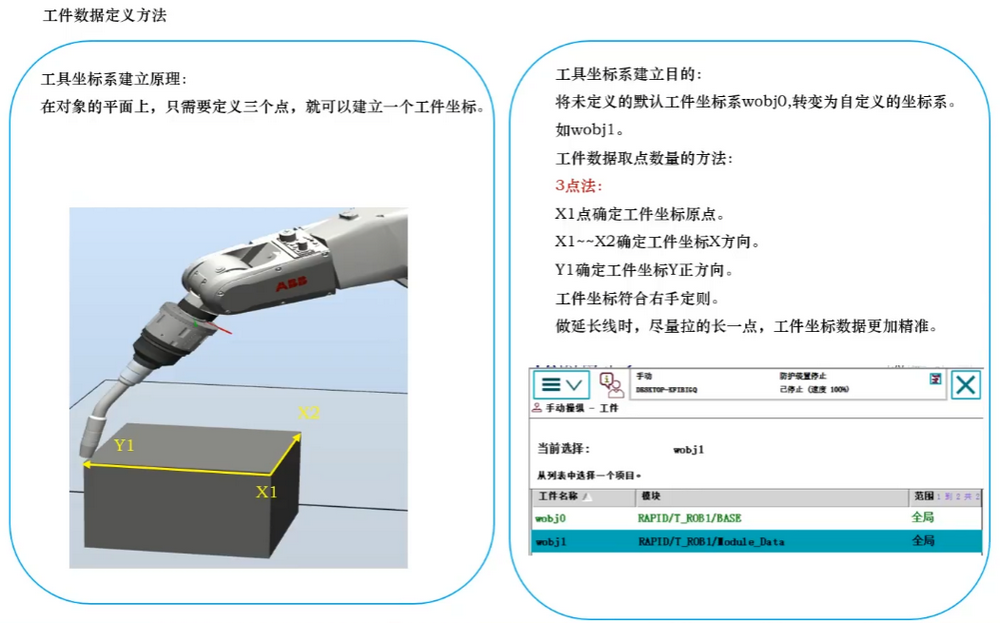
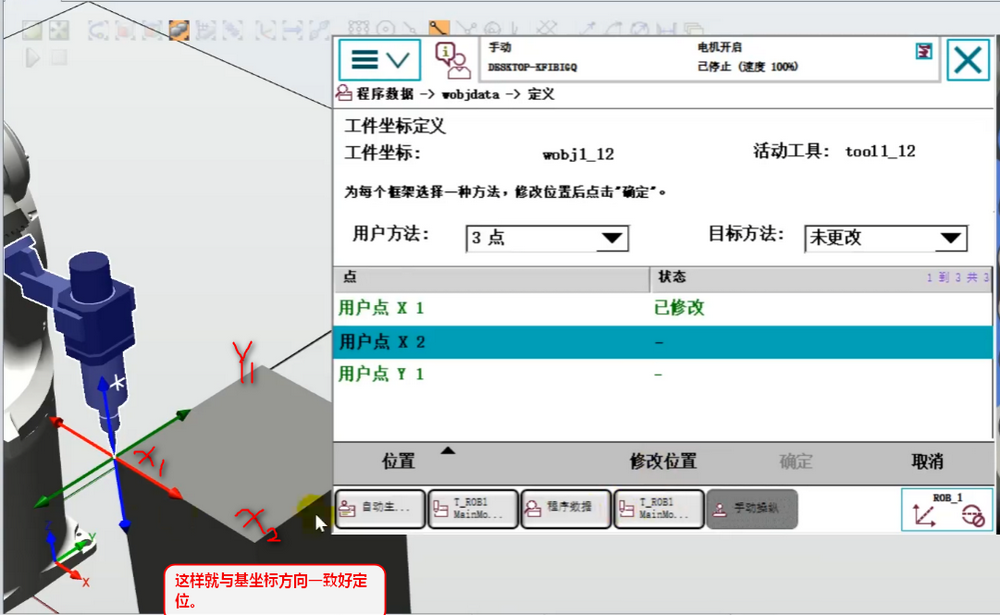
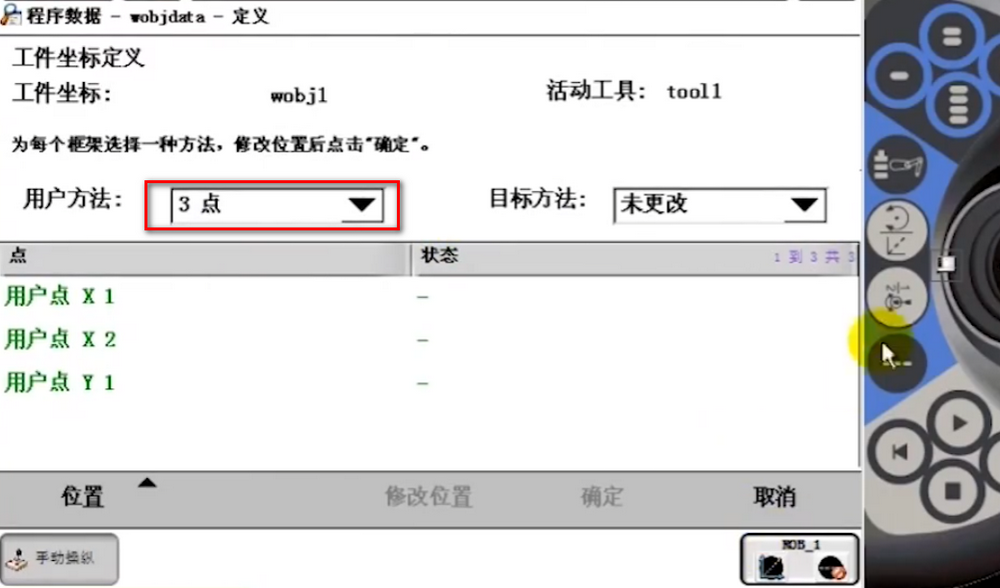
在定义窗口中用户方法选择3点法。
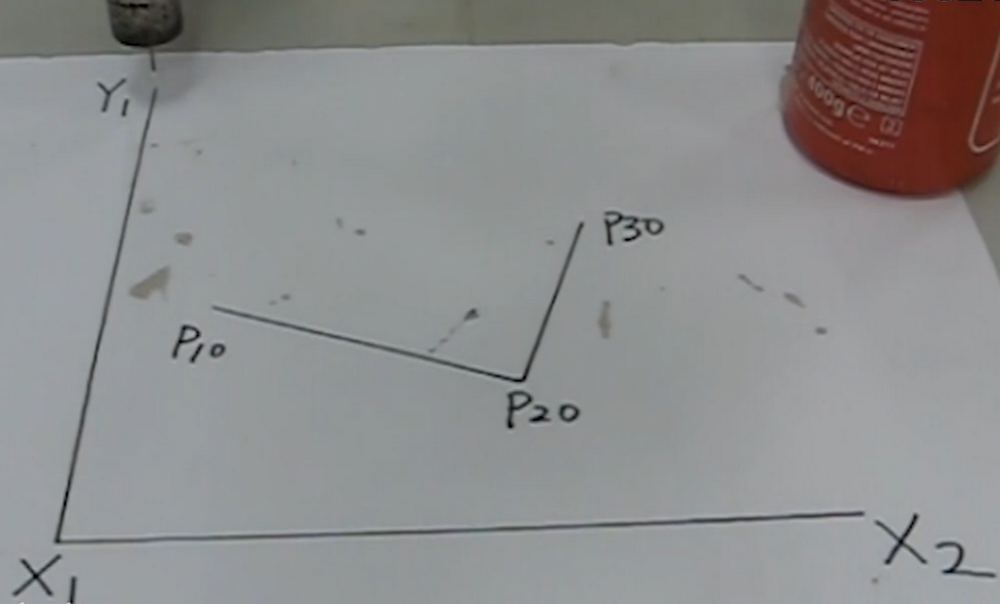
机器人到达X1点后,选择用户点X1,再点修改位置。
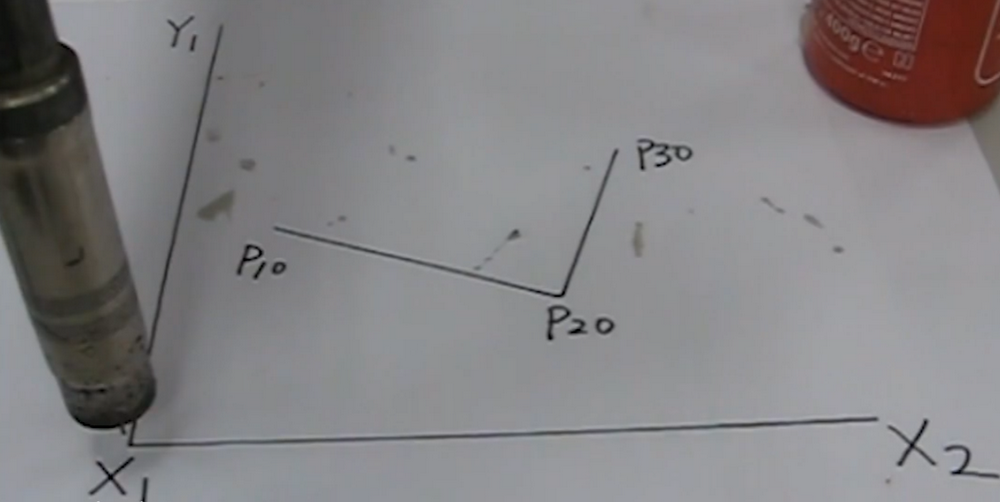
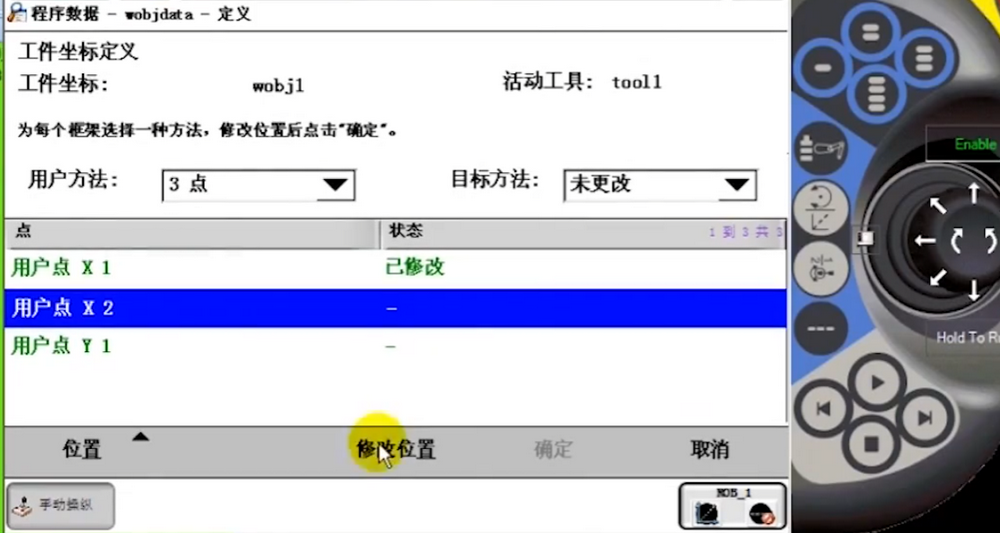
机器人到达X2点后,选择用户点X2,再点修改位置。
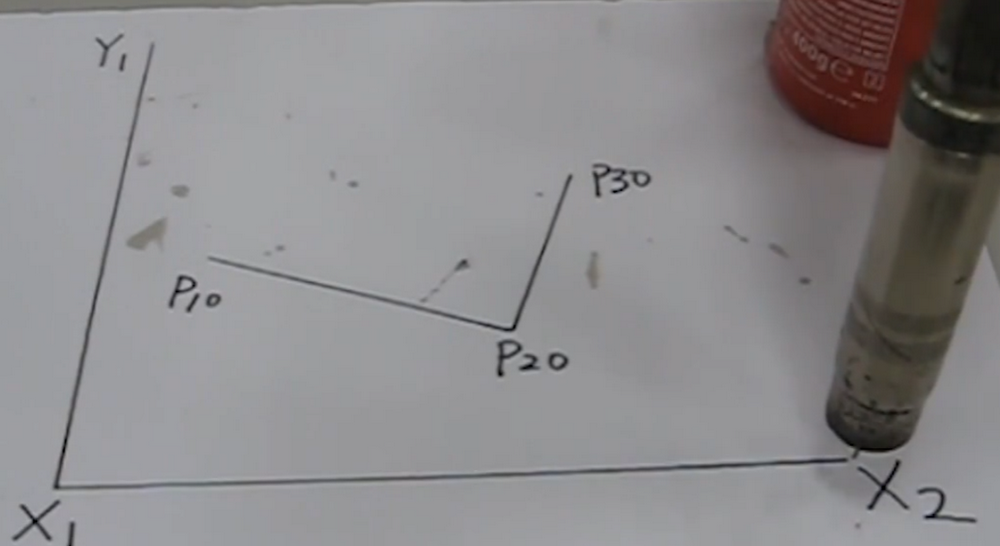

机器人到达Y1点后,选择用户点Y1,再点修改位置。
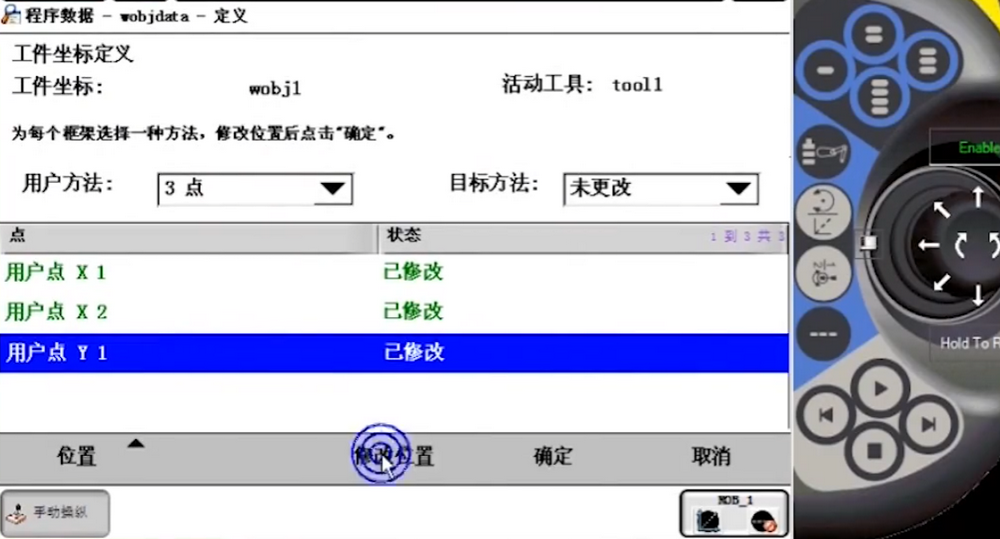
此时点击确定就可以得到定义的工件坐标信息了。

选择新建的工件坐标wobj1——确定。