机器人的坐标有世界坐标【大地坐标】,基坐标,工具坐标,工件坐标
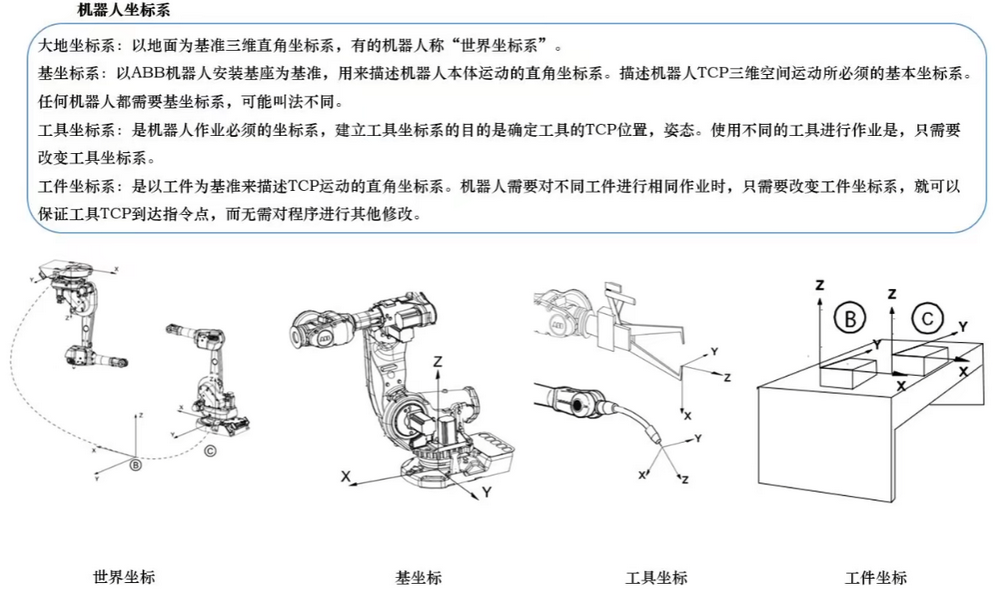
如果是垂直于地面安装的话大地坐标与基坐标是重合的,常用的地面安装大地坐标与基坐标是重合的。如本例中的机器人如果向X轴运动,机器人相对于基坐标是没有运动的,而相对于大地坐标是有位移的。
世界坐标:像机器人是顶装或侧装时,多个机器人协调工作时,以及需要确定基座位置时,来确定它的位置。
基坐标:是安装在机器人的基座上的,是机器人本体运动的直角坐标系。本体各个轴关节的位移都是相对于基坐标的。
工具坐标:机器人的默认工具坐标tool0是在法兰盘的中心点。