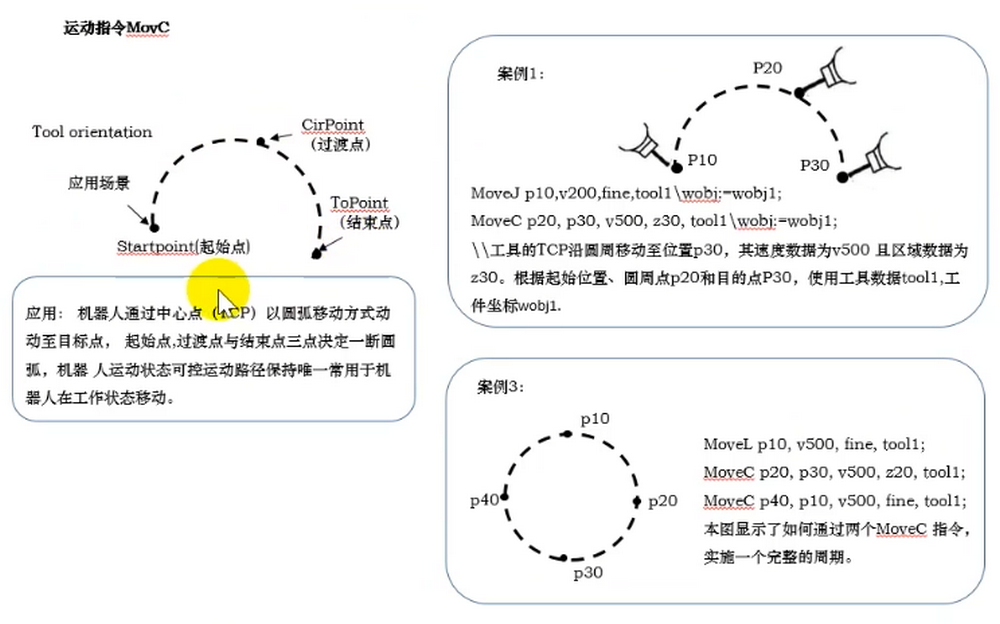
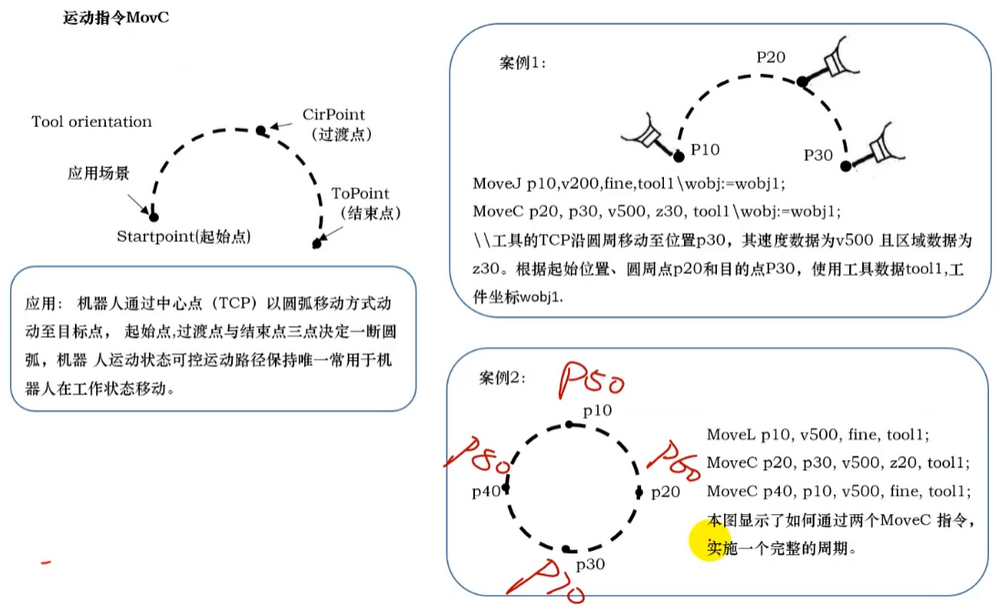
运动指令MoveC
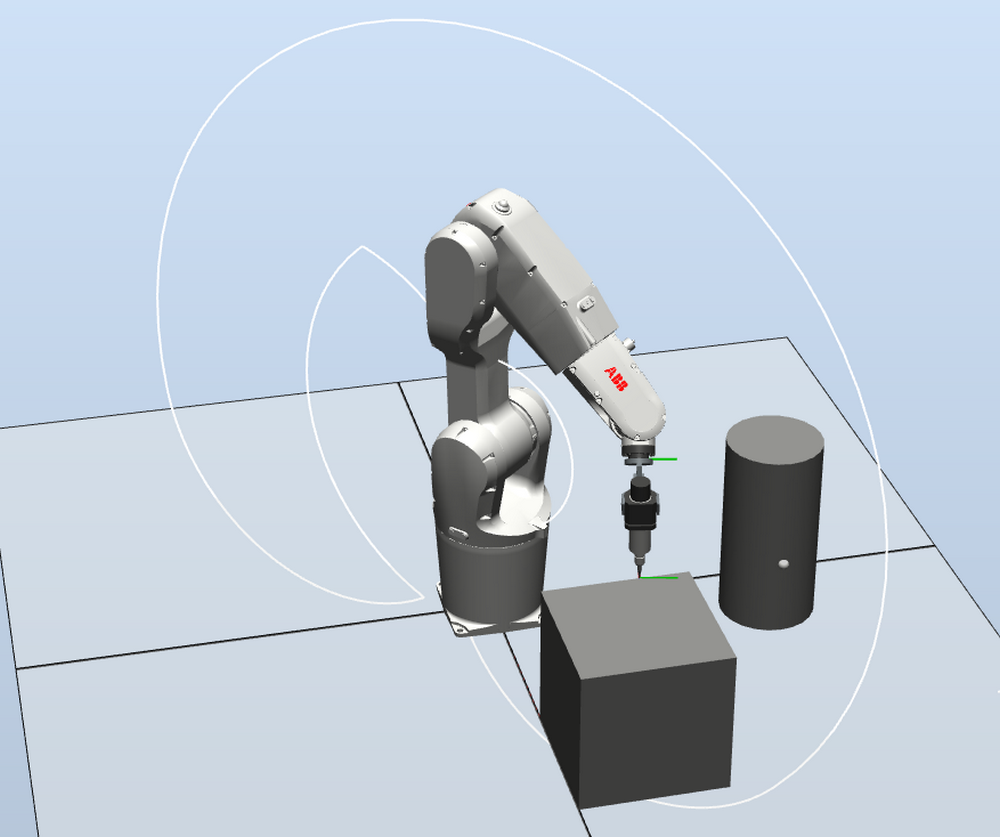
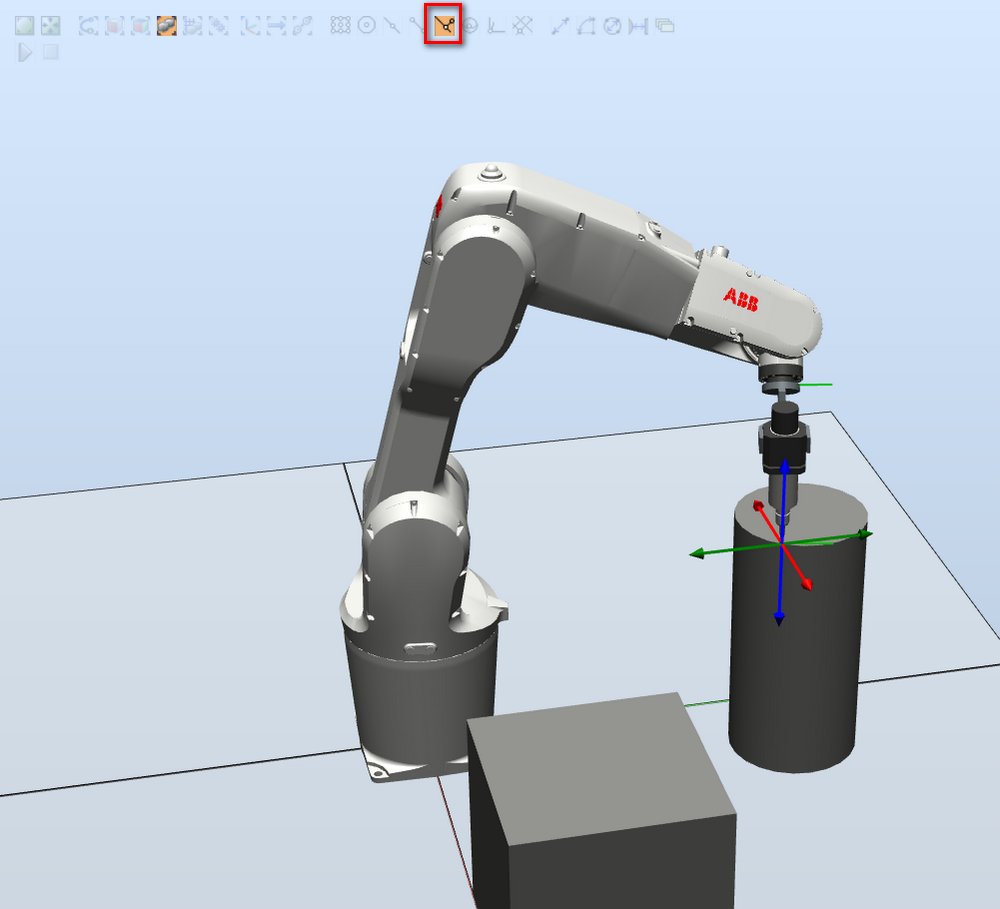
在建模—–固体—-圆柱;点击机器人右键属性显示机器人工作区域;查看圆柱是否在工作区域内。
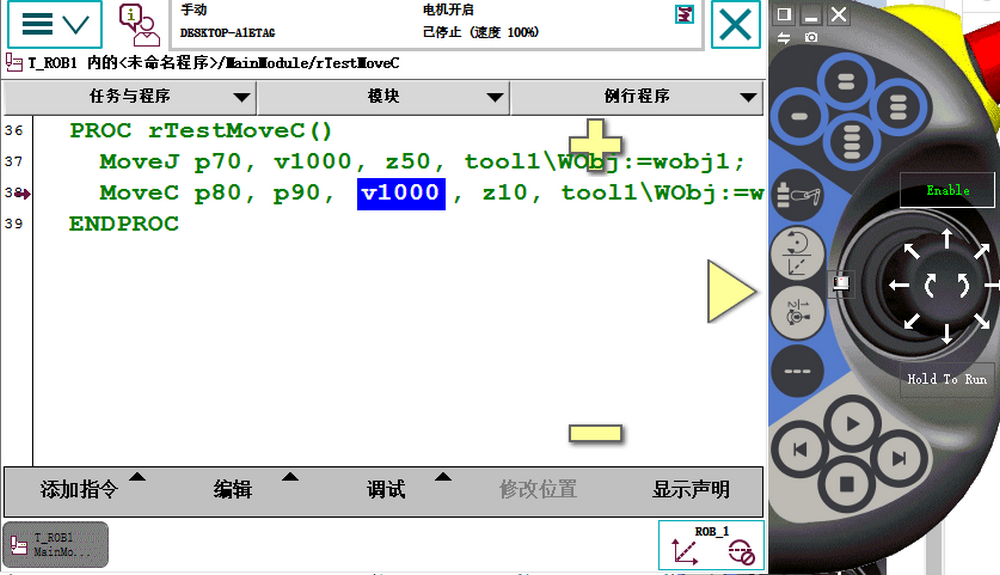
在示例程序rTestMoveC中添加MoveC指令;
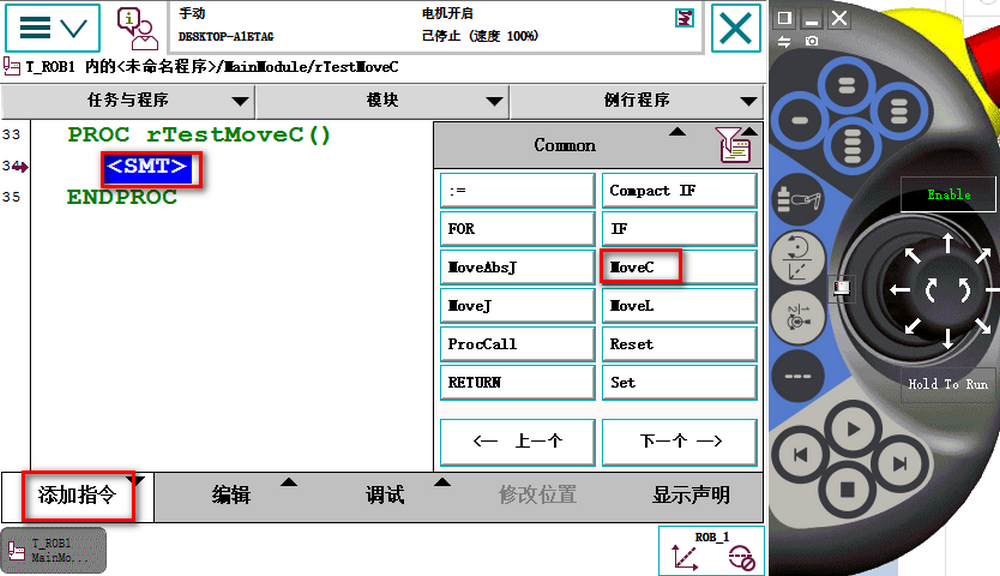
MoveC需要三个点,而新建好的只有两个点,所以需要在上方新建一个MoveJ来添加一个点。分别P70,P80,P90;
进行示教器的示教;打开边缘捕捉这样更容易找到。
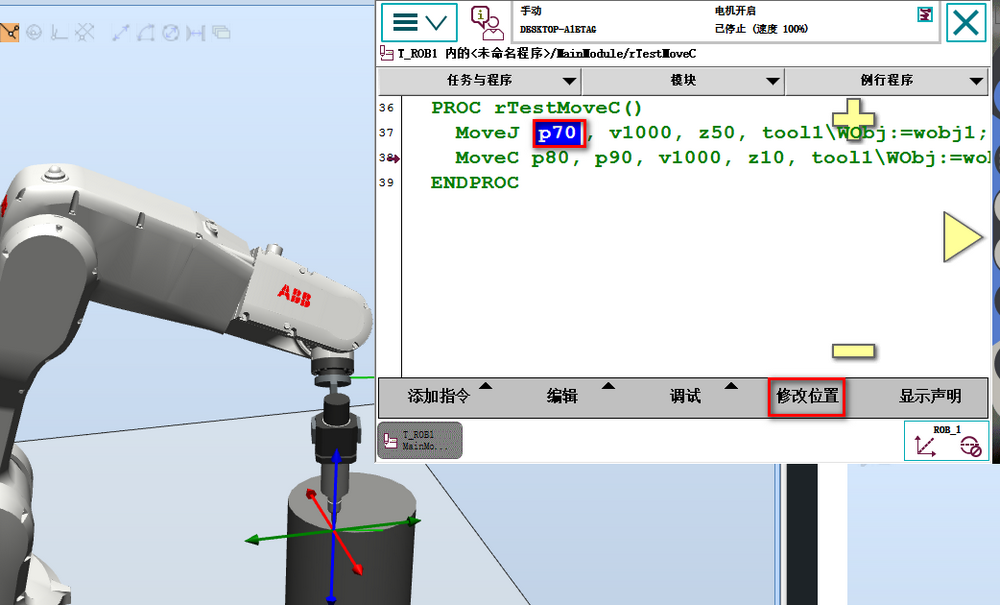
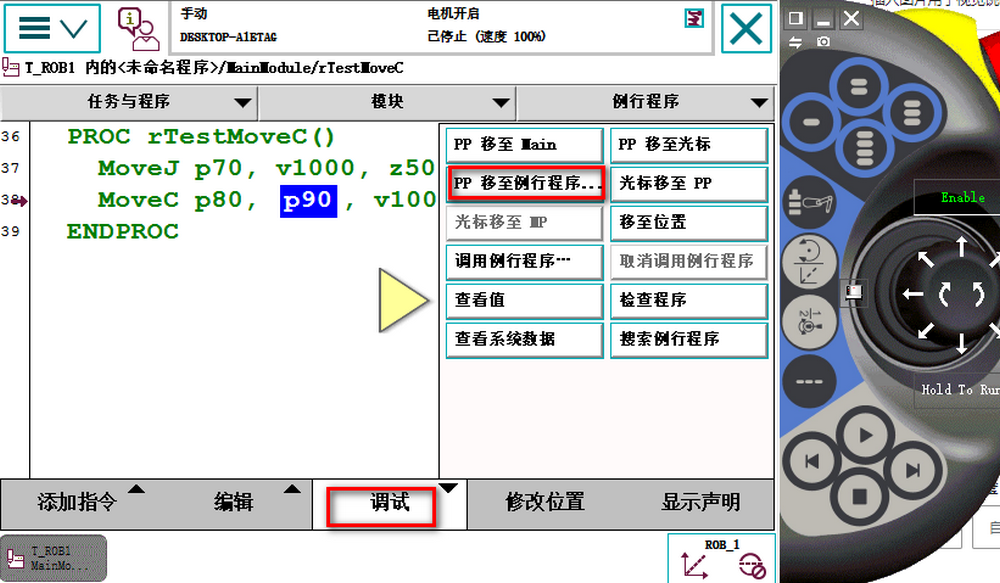
都示教完以且点击调试—-PP移至示例程序….
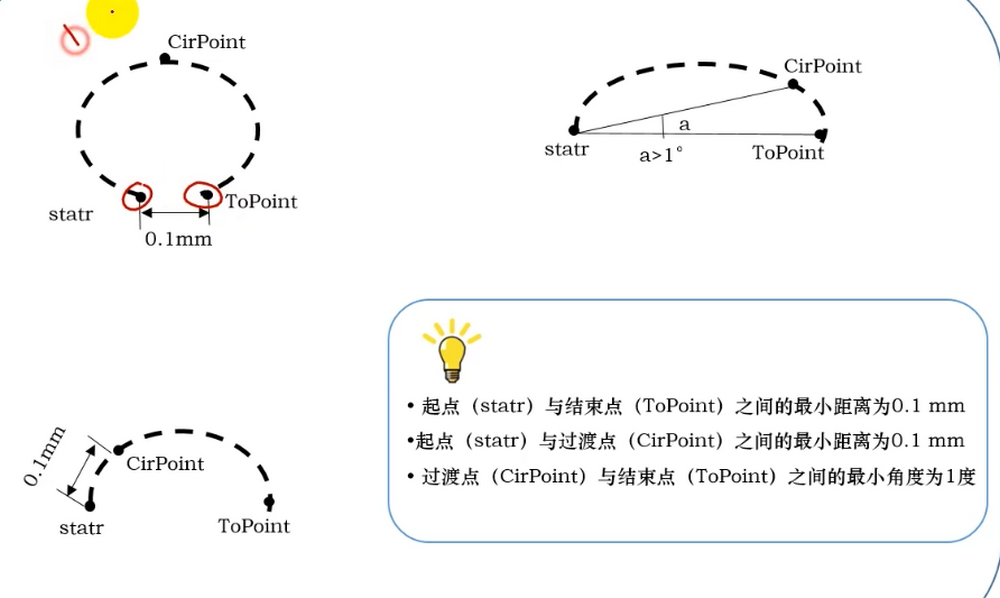
对于MoveC运动指令的应用案例
运动指令MoveC
在建模—–固体—-圆柱;点击机器人右键属性显示机器人工作区域;查看圆柱是否在工作区域内。
在示例程序rTestMoveC中添加MoveC指令;
MoveC需要三个点,而新建好的只有两个点,所以需要在上方新建一个MoveJ来添加一个点。分别P70,P80,P90;
进行示教器的示教;打开边缘捕捉这样更容易找到。
都示教完以且点击调试—-PP移至示例程序….
对于MoveC运动指令的应用案例