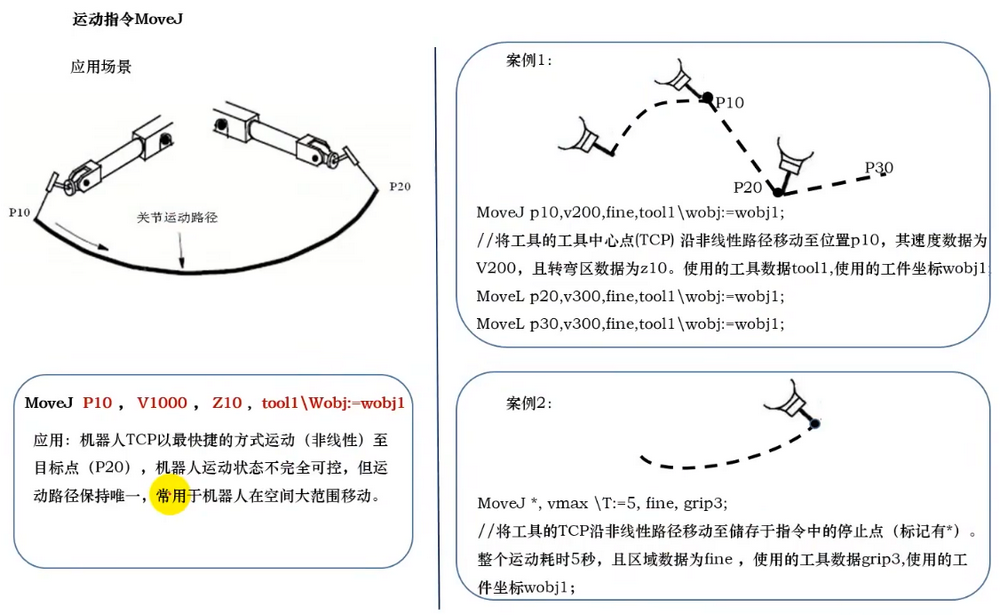
MoveL是P10到达P20是走直线过去的。而MoveJ是P10到达P20是走弧线过去的;常用于机器人在大空间范围内移动。
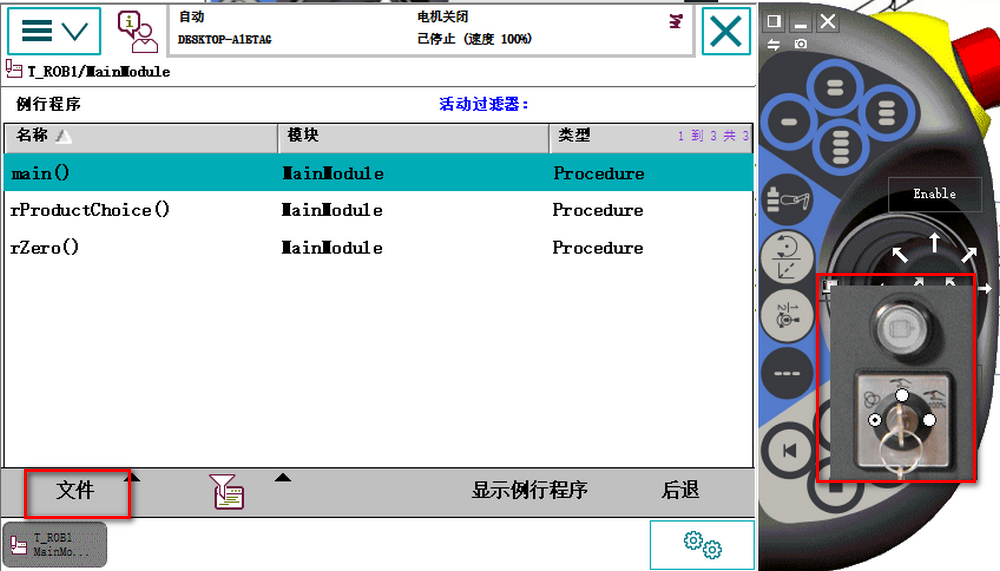
当示教器处于自动模式下,在模块中如MainModel中是无法新建新的示例的。
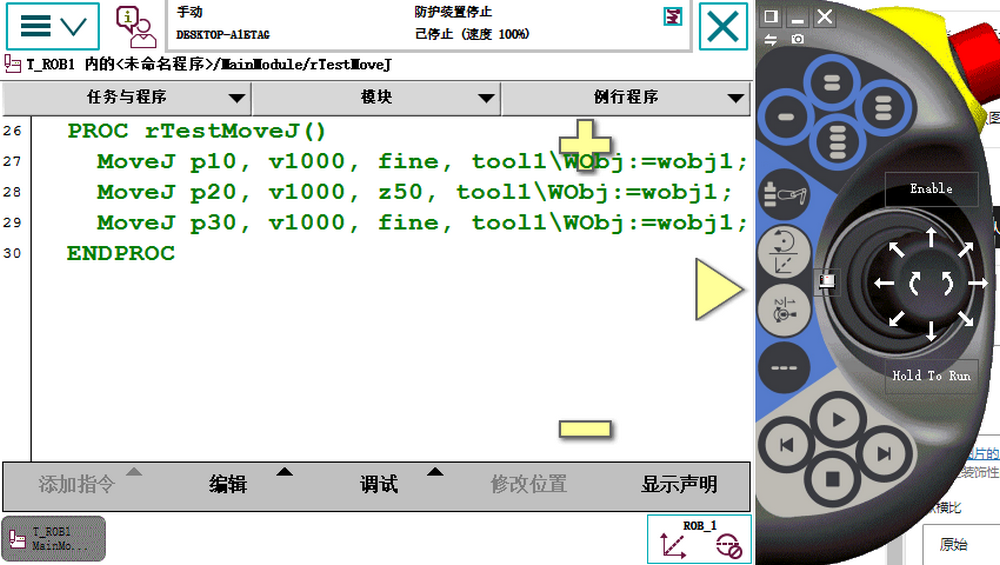
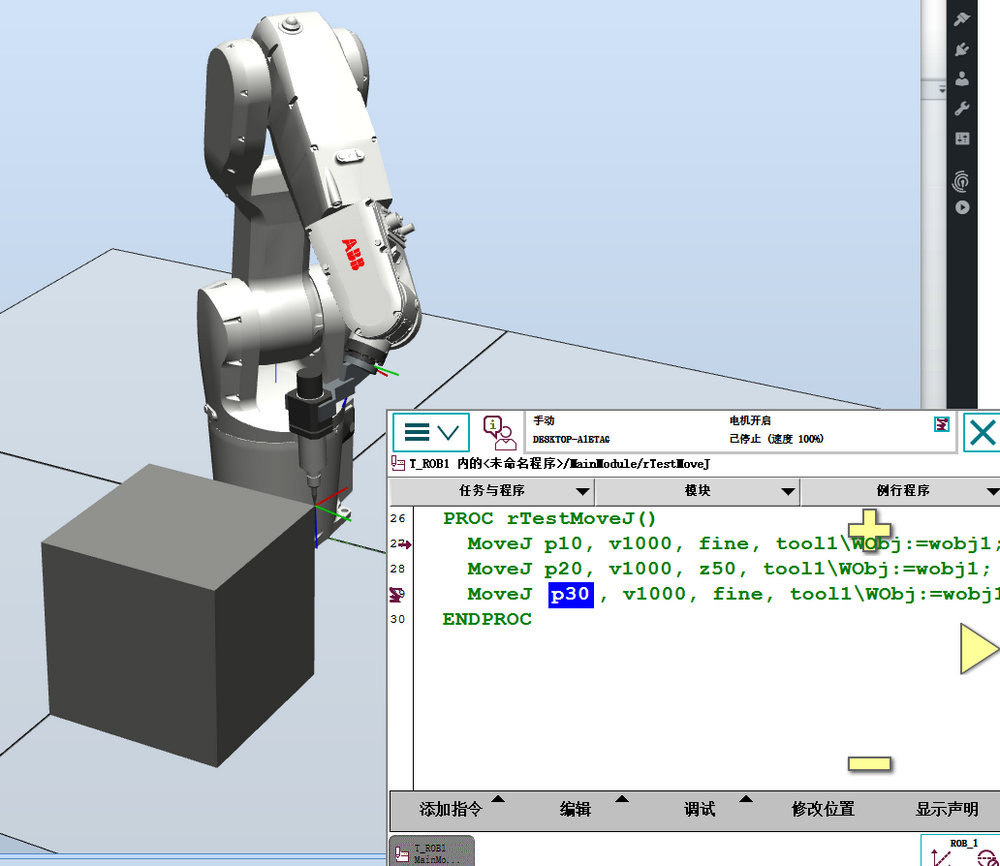
在MainModel模块下新建了一个rTestMoveJ示例。并编写相应的代码;
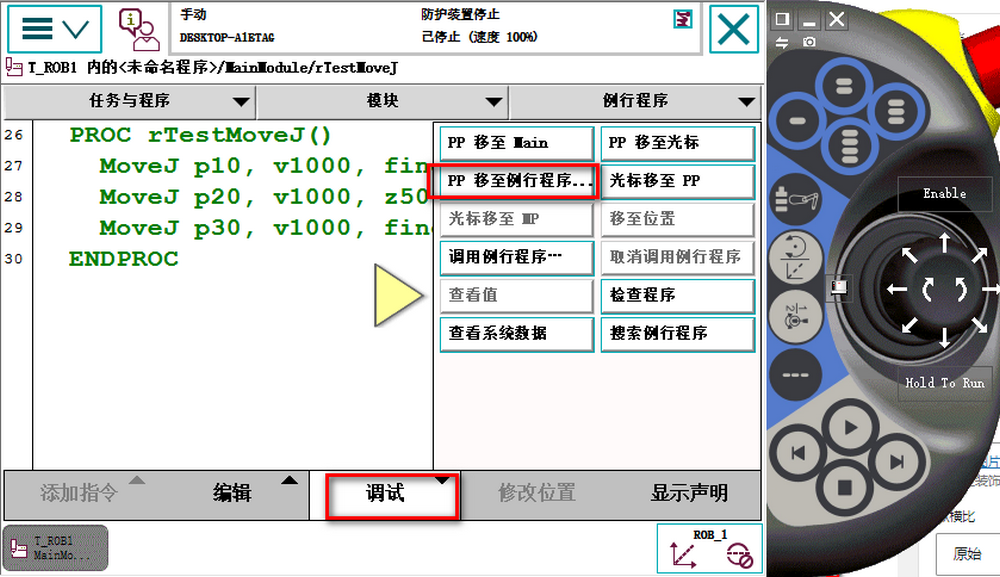
点击调试—-PP移至例行程序
此时运行程序就可以看到运行效果啦,机器人是沿弧线走的。
MoveL是P10到达P20是走直线过去的。而MoveJ是P10到达P20是走弧线过去的;常用于机器人在大空间范围内移动。
当示教器处于自动模式下,在模块中如MainModel中是无法新建新的示例的。
在MainModel模块下新建了一个rTestMoveJ示例。并编写相应的代码;
点击调试—-PP移至例行程序
此时运行程序就可以看到运行效果啦,机器人是沿弧线走的。