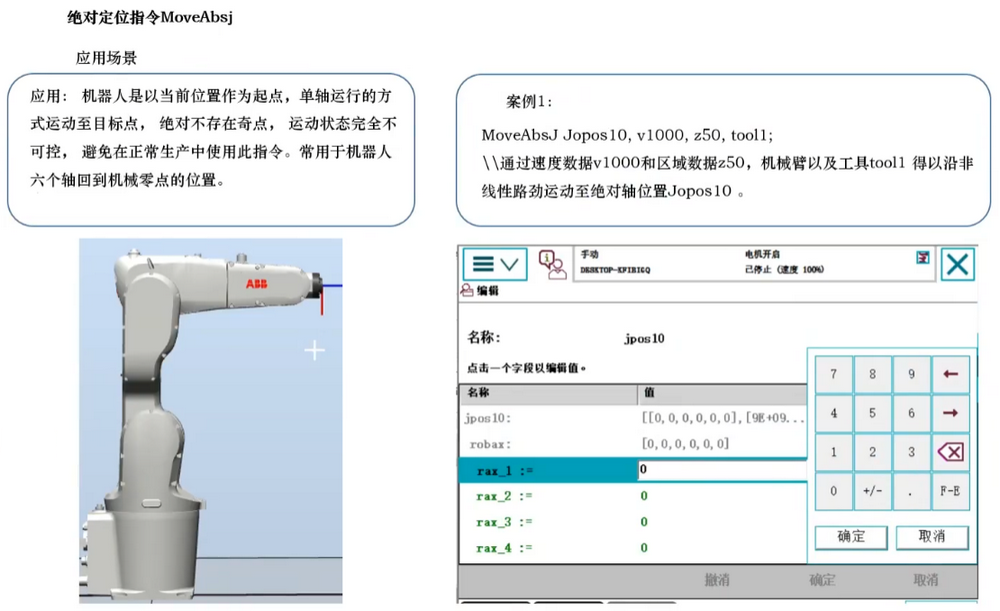
MoveAbsj绝对定位指令的应用场景。不参考工具坐标也不参考工件坐标;机器人以关节零度为参考到达目标位置。在调试的时候是经常用到的。常用于机器人六个轴回到机械零点的位置。
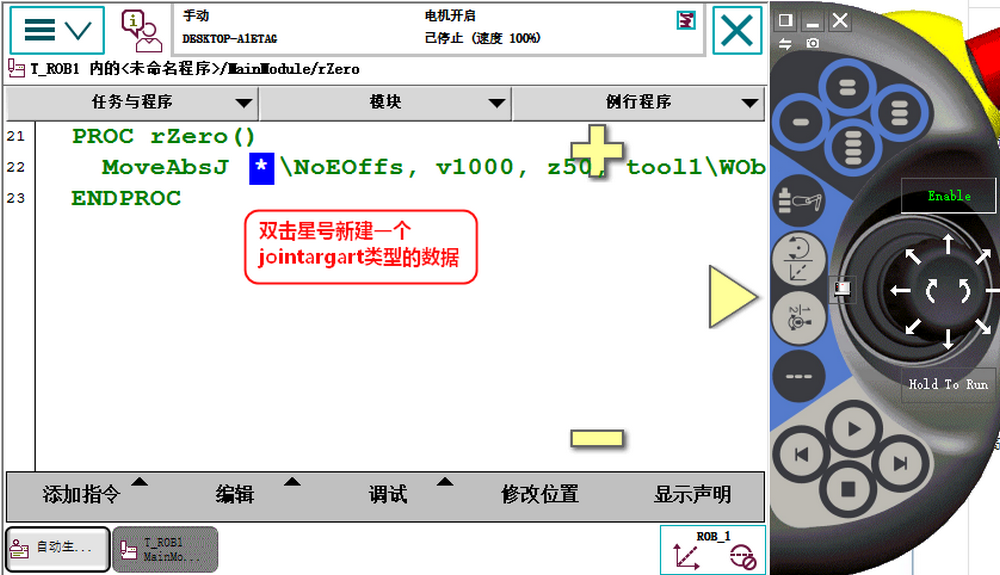
在MoveAbsj指令中新建一个jointargart类型的变量、
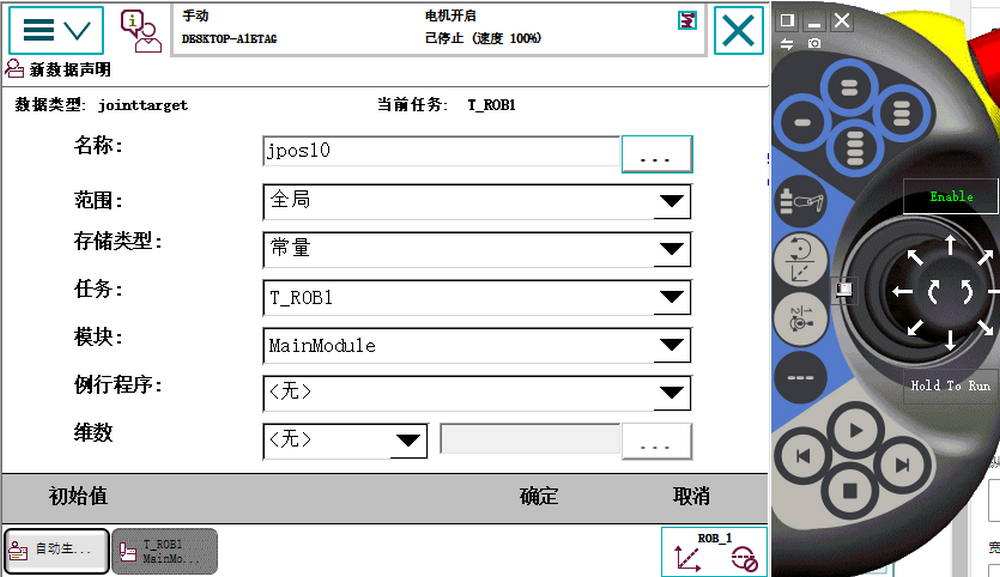
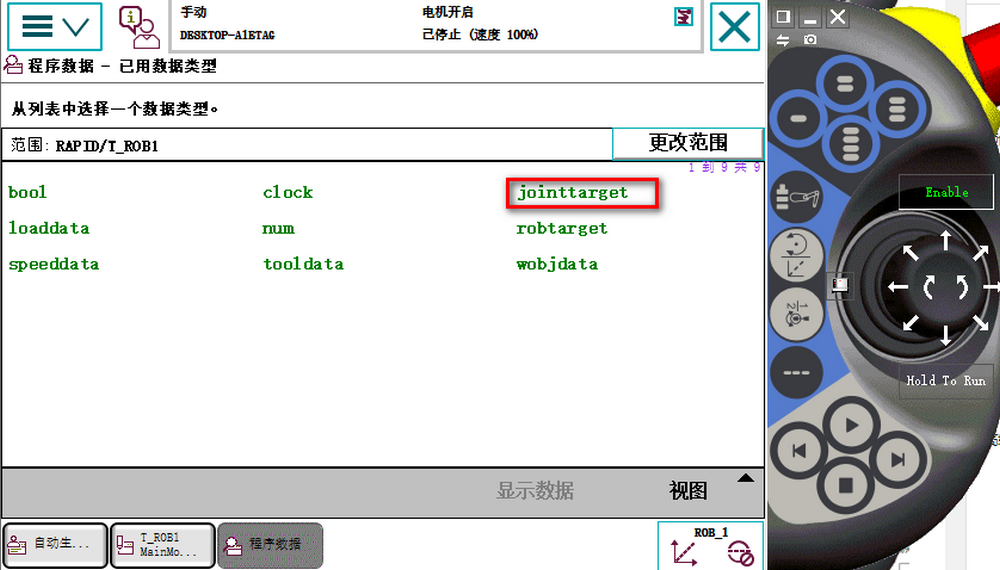
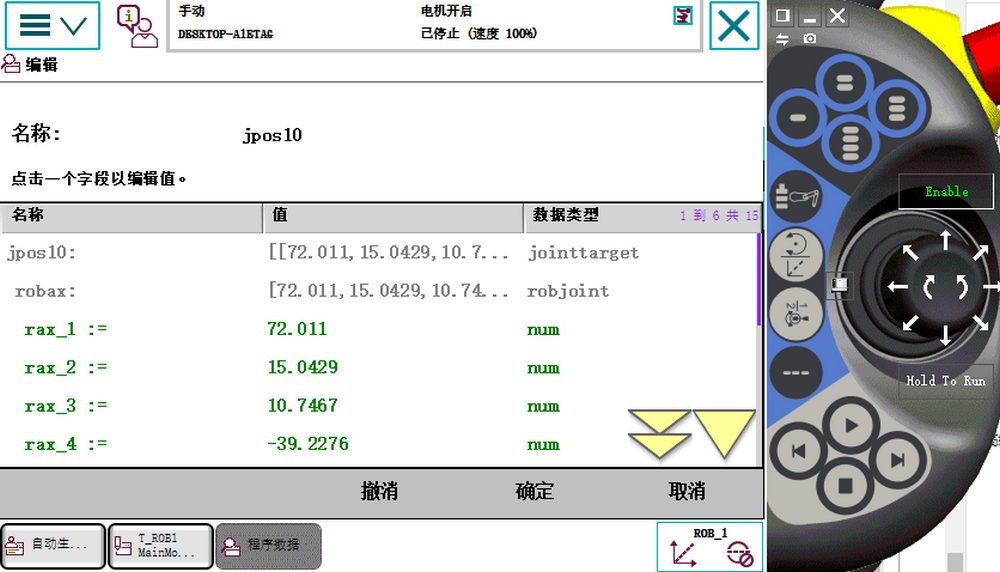
新建完jointtarget类型后就可以通过程序数据查看其数据类型的数据了。
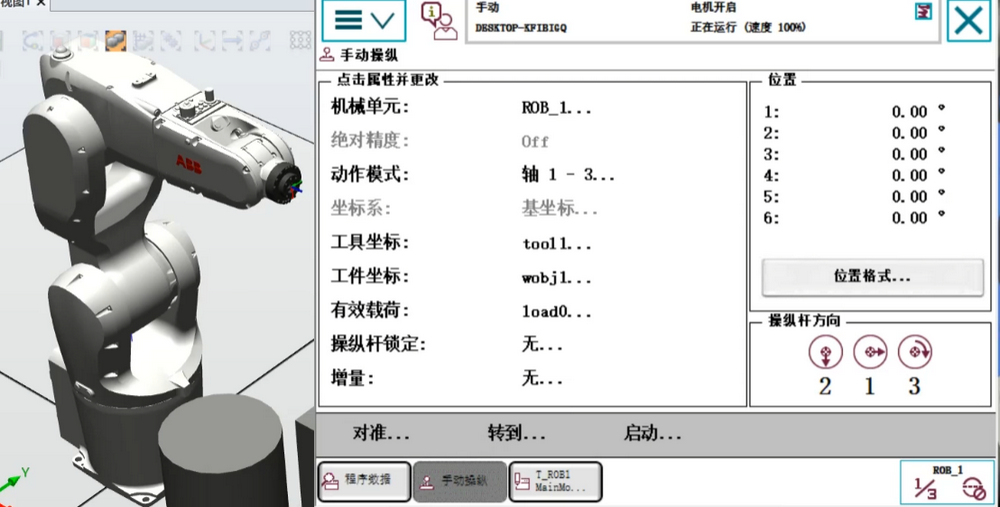
这样机器人就可以回到原点了。机器人以关节零度为参考到达目标位置。
MoveAbsj绝对定位指令的应用场景。不参考工具坐标也不参考工件坐标;机器人以关节零度为参考到达目标位置。在调试的时候是经常用到的。常用于机器人六个轴回到机械零点的位置。
在MoveAbsj指令中新建一个jointargart类型的变量、
新建完jointtarget类型后就可以通过程序数据查看其数据类型的数据了。
这样机器人就可以回到原点了。机器人以关节零度为参考到达目标位置。