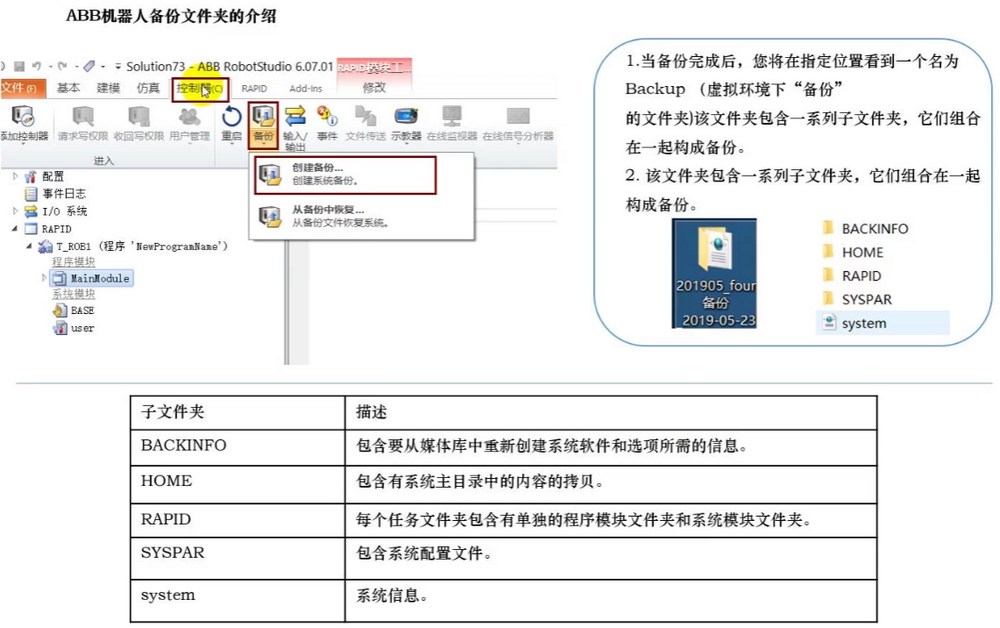
机器人备份文件夹的介绍
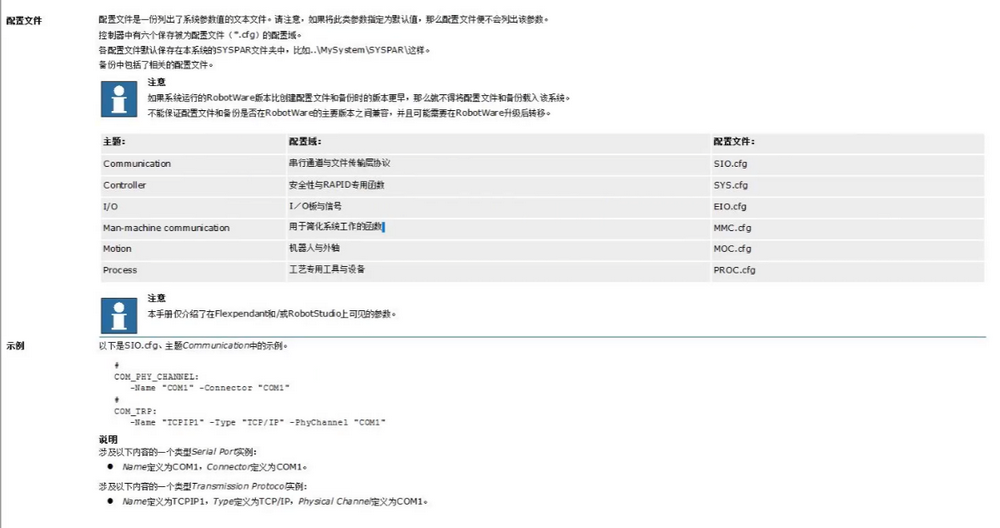
配置文件
虚拟示教器中的程序和数据通过模块导入到真实的控制器中。

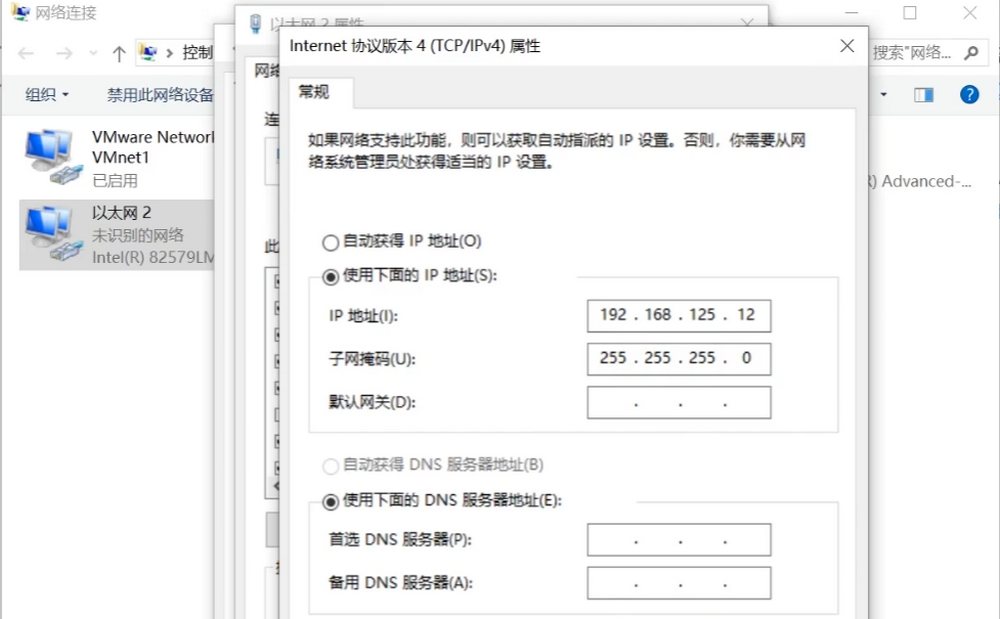
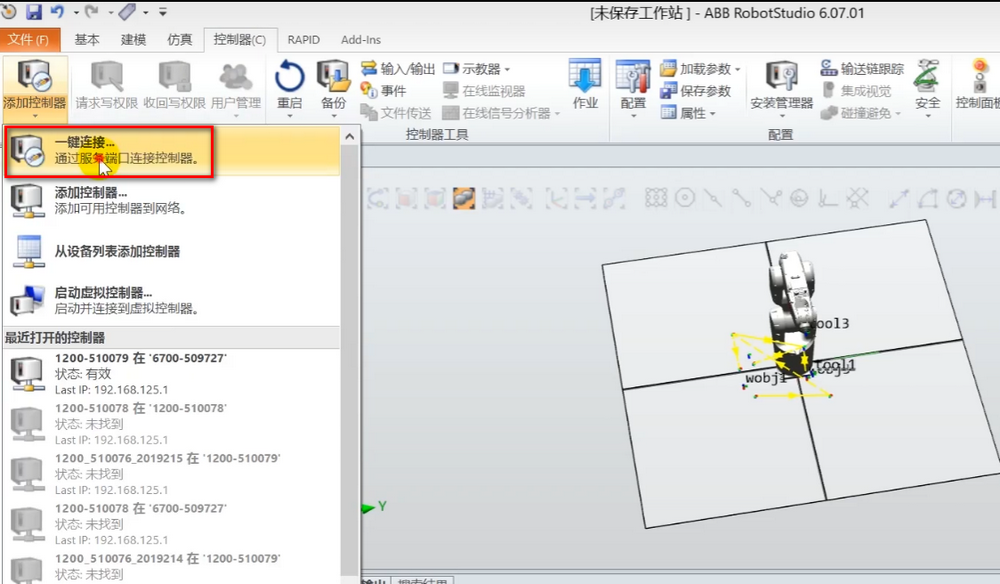
要实现联机:1、要使装有RobotStudio软件的电脑与机器人控制器处于同一网段。机器人的接口插入X2口【服务口专门连电脑的】。
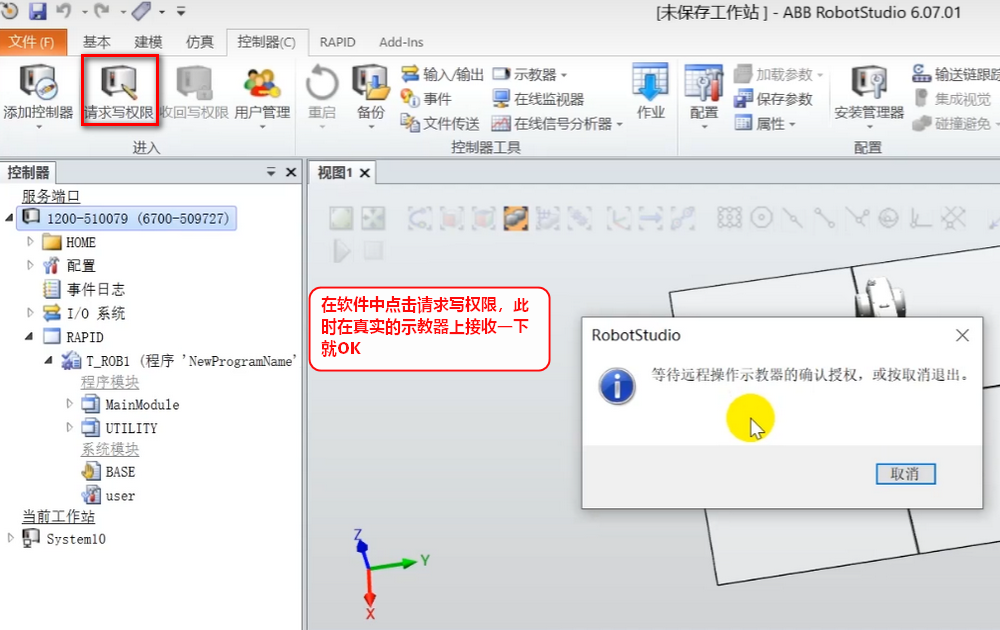
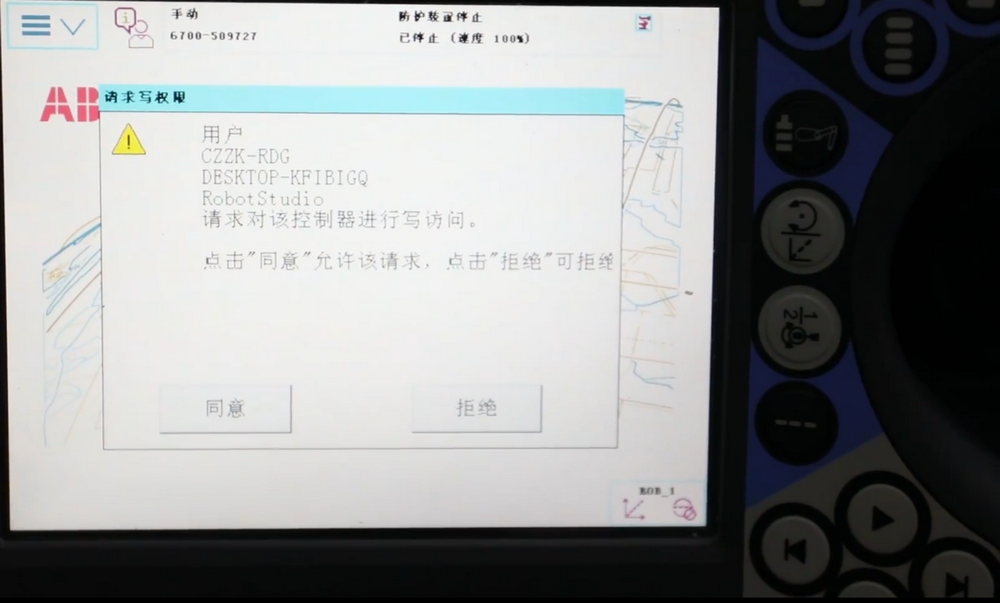
在软件中点击请求写权限,此时在真实的示教器上同意一下就OK
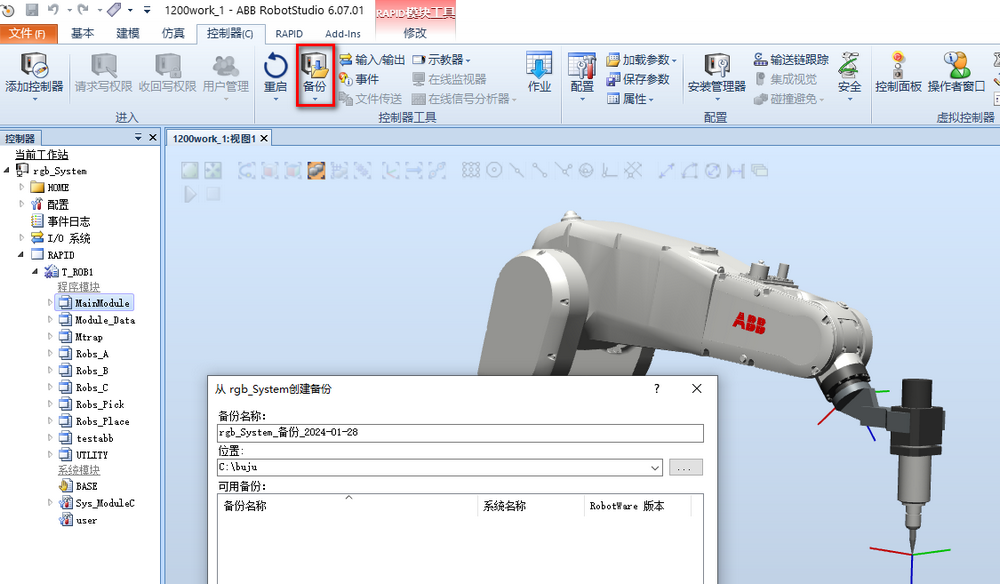
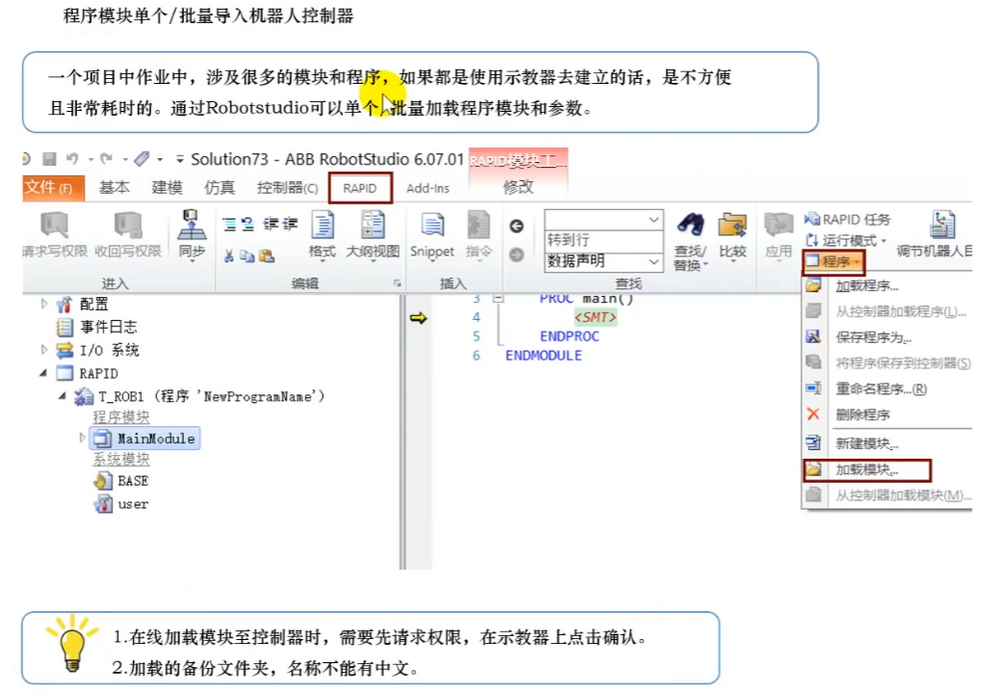
程序模块单个/批量导入机器人控制器。
注:要注意备份机器人控制器中的数据和RobotStudio软件中的数据。机器人的服务口已固定192.168.125.X
机器人备份文件夹的介绍
配置文件
虚拟示教器中的程序和数据通过模块导入到真实的控制器中。
要实现联机:1、要使装有RobotStudio软件的电脑与机器人控制器处于同一网段。机器人的接口插入X2口【服务口专门连电脑的】。
在软件中点击请求写权限,此时在真实的示教器上同意一下就OK
程序模块单个/批量导入机器人控制器。
注:要注意备份机器人控制器中的数据和RobotStudio软件中的数据。机器人的服务口已固定192.168.125.X