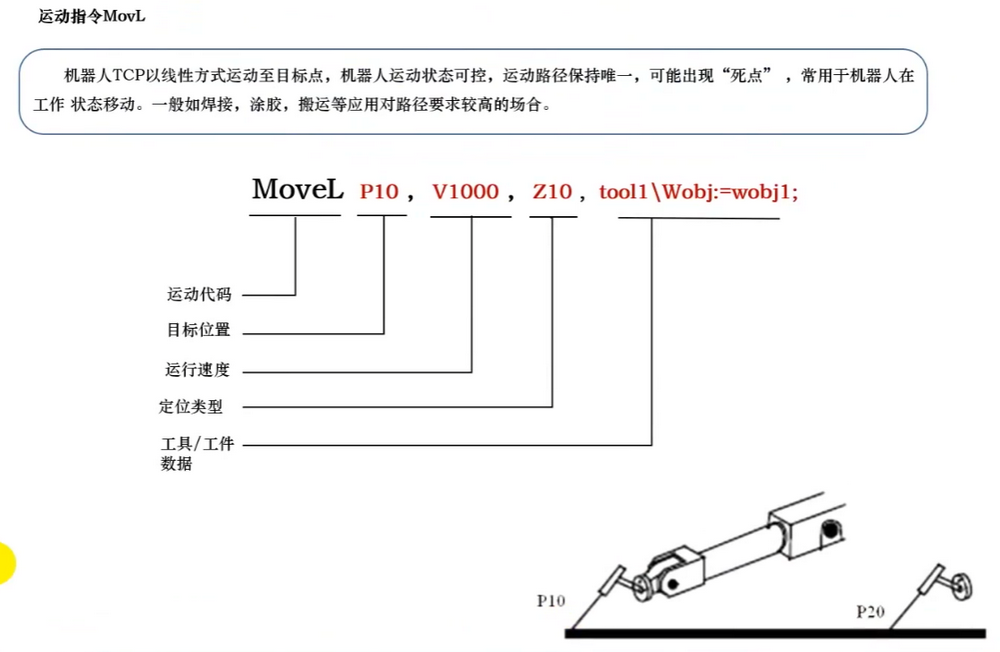
机器人的TCP如果没有装工具的话在法兰盘的中心点,如果安装了工具如焊枪则TCP就在焊枪的末端了。线性运动是机器人的多个轴的配合让TCP点做直线运动。
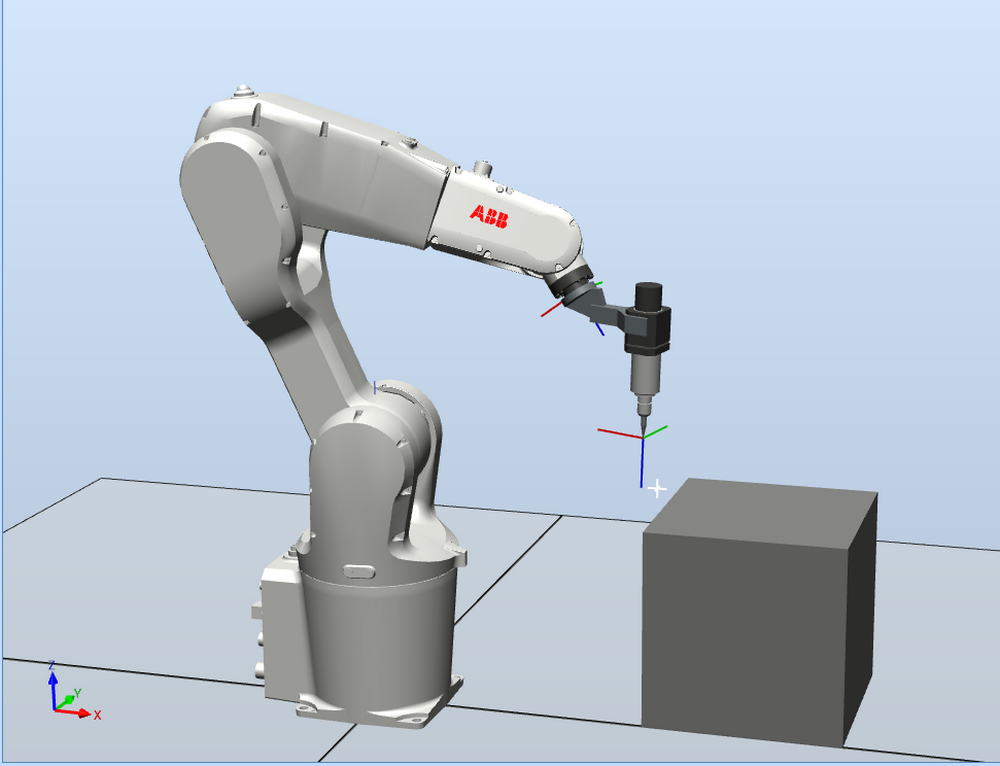
将机器人对着点位后再移动到上空,
选中当前指令—-调试—–PP移至例行程序。
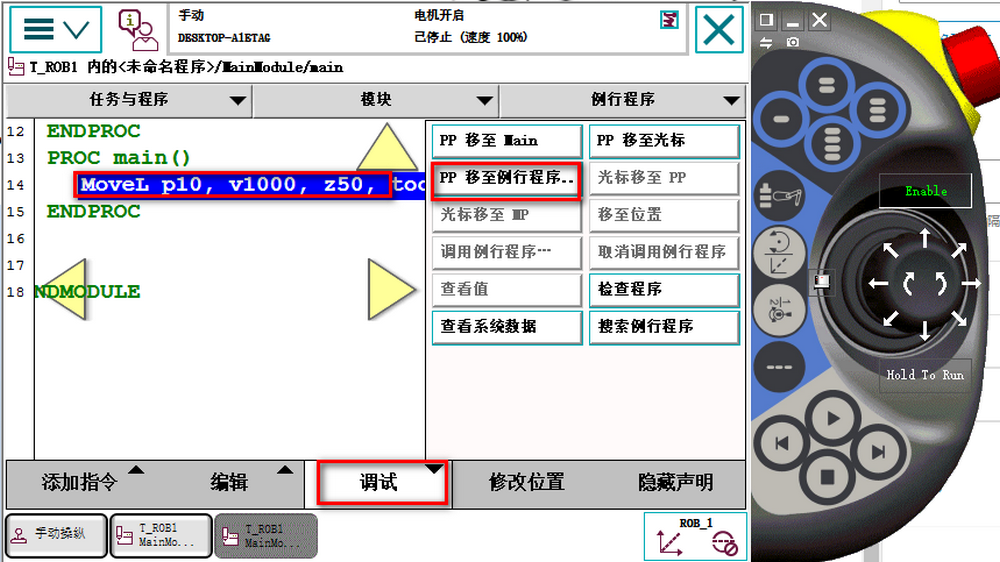
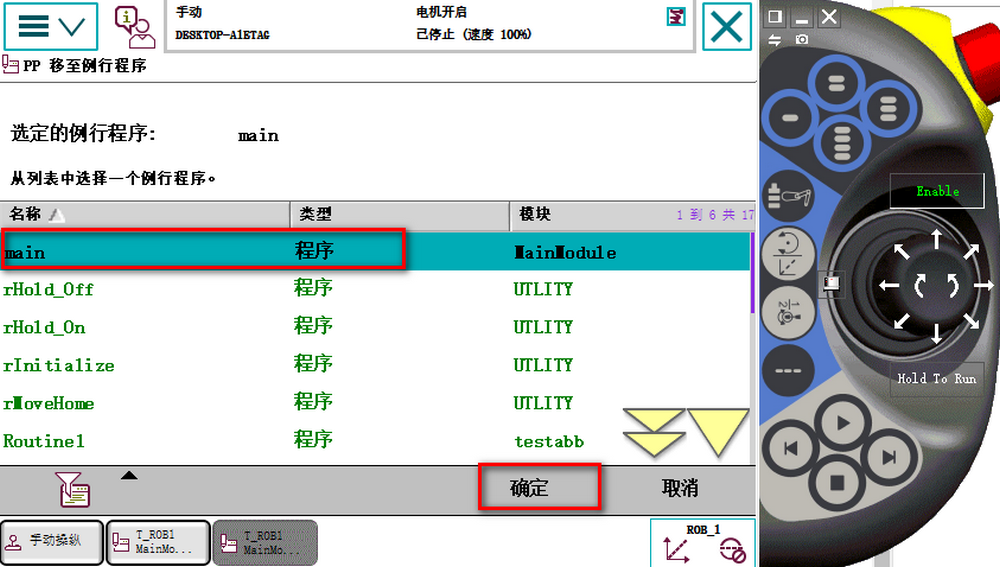
跳转到main例行程序—-确定。
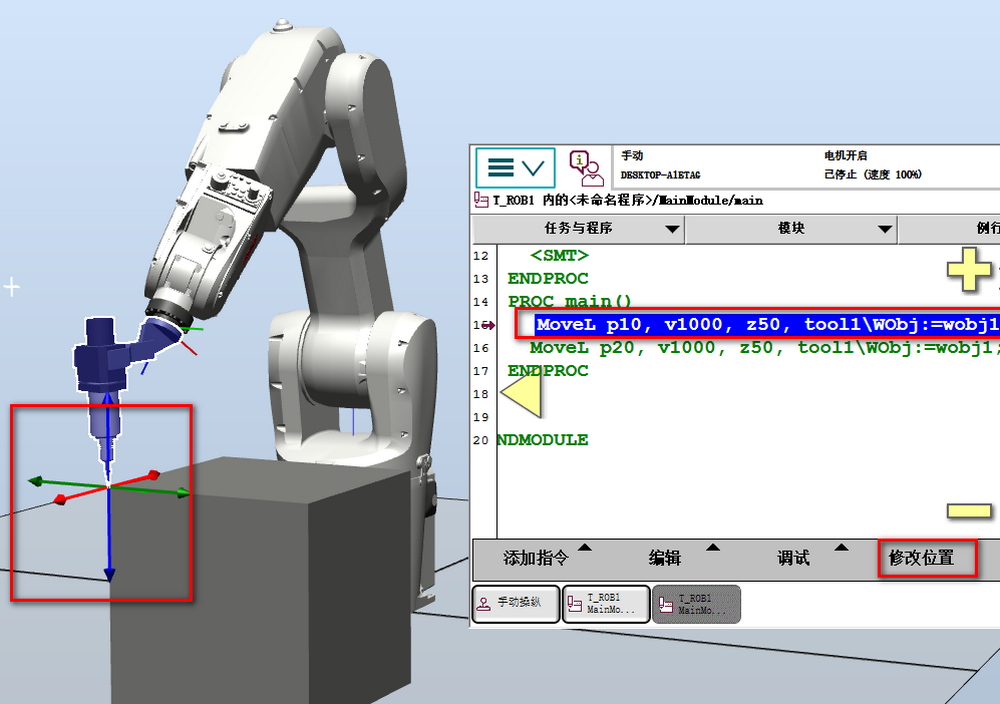
将机器手对着某个位置然后点击修改位置。
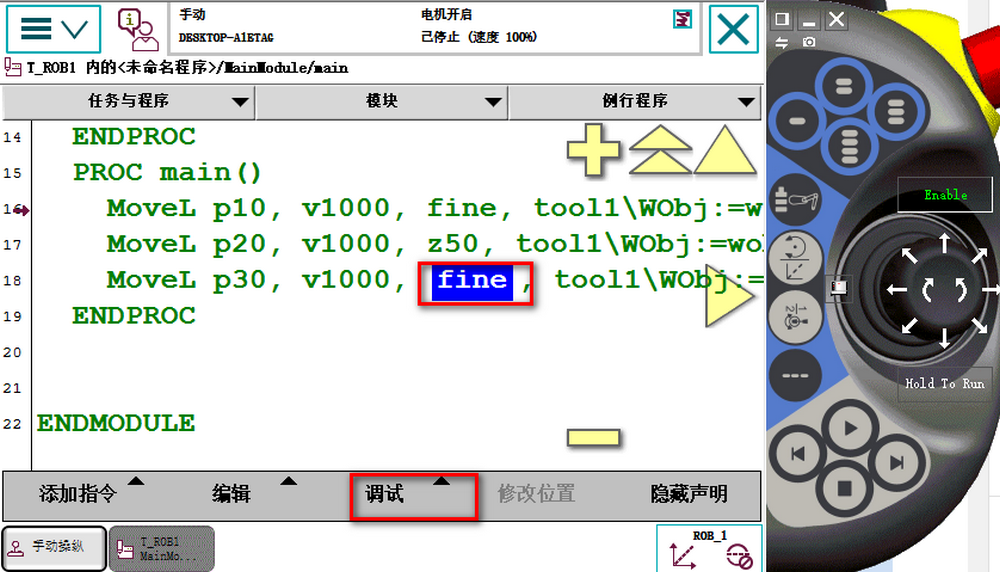
直线运行的最后一个位置类型要设成fine,双击Z50移动到最上方选中find,再点击调试中的PP移到实例程序。并确定。此时运行程序就可以走到拐弯点了。
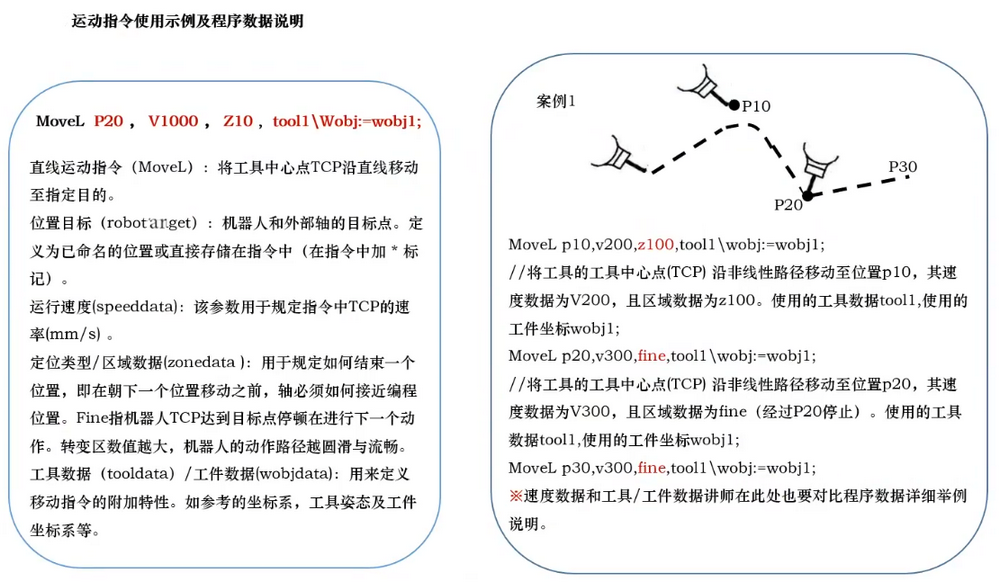
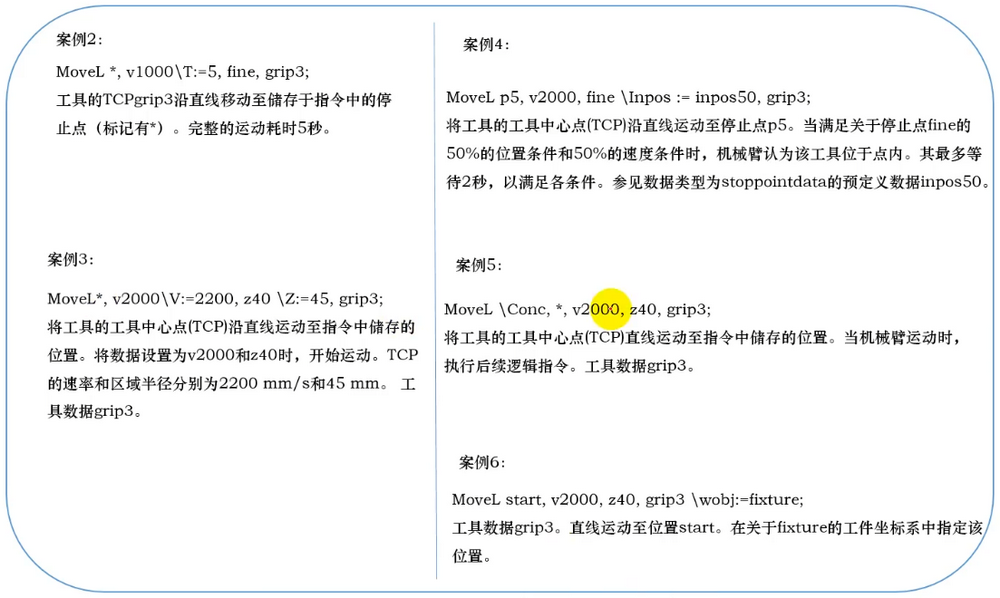
运动指令使用示例
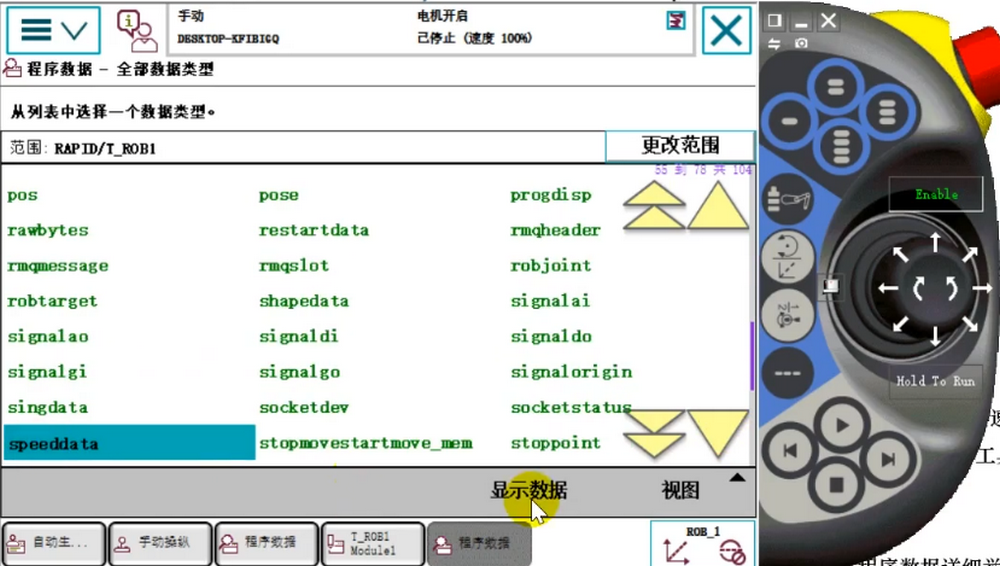
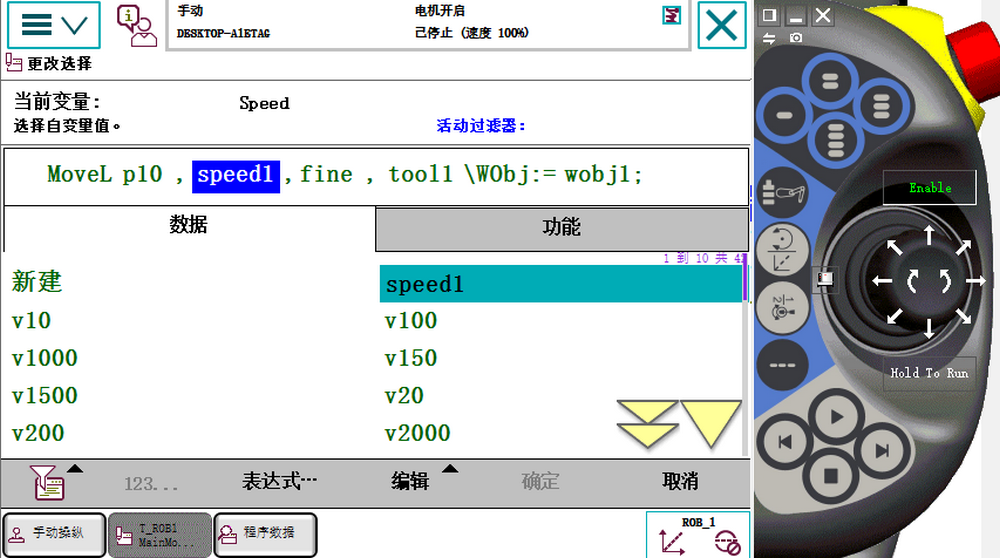
新建速度数据类型。选择speeddata—–显示数据
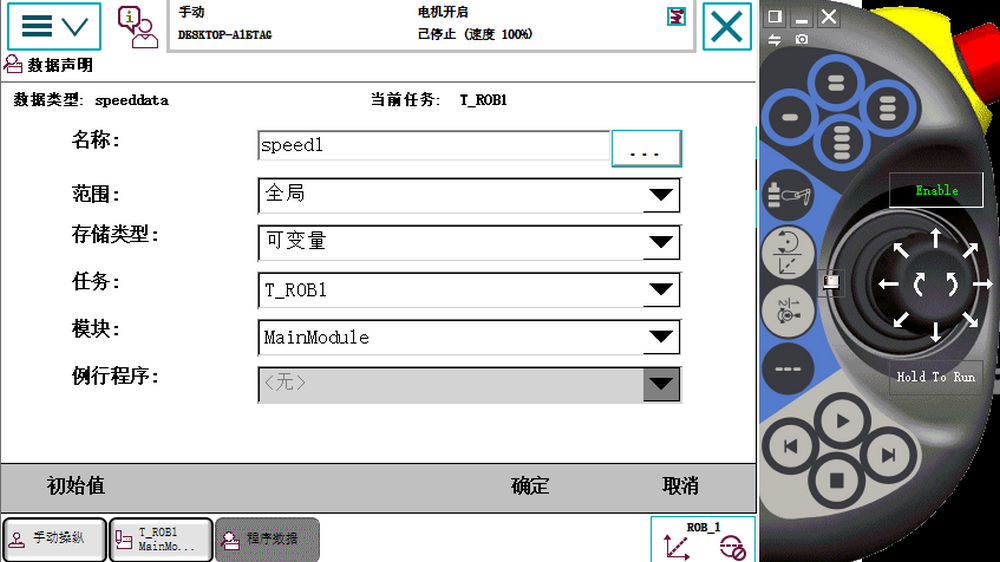
新建一个速度类型的变量speed1
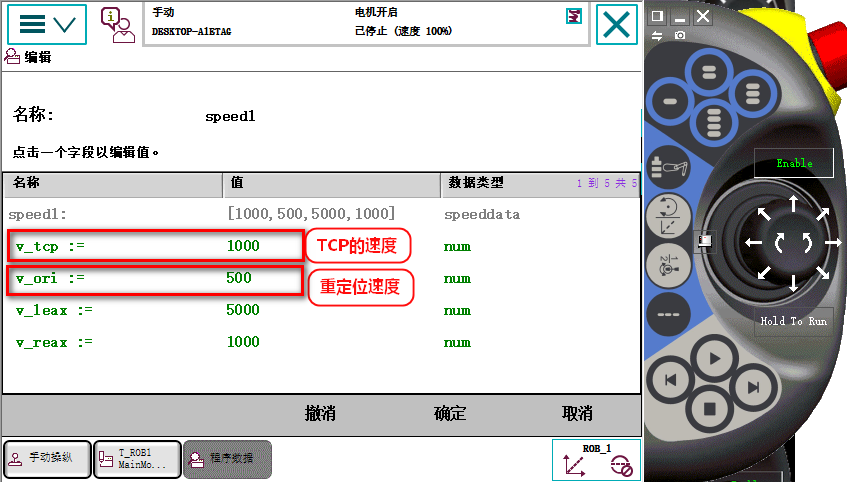
创建的速度变量就可以在程序中应用了。
下面几个实际的例子来修改参数。
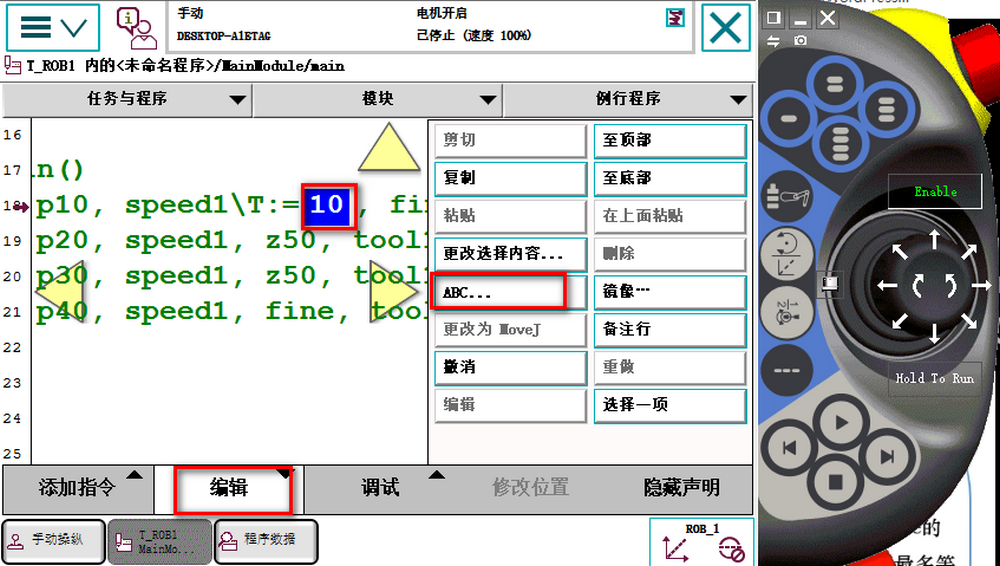
此时就不是走线性的速度了,而是以时间为参考了。

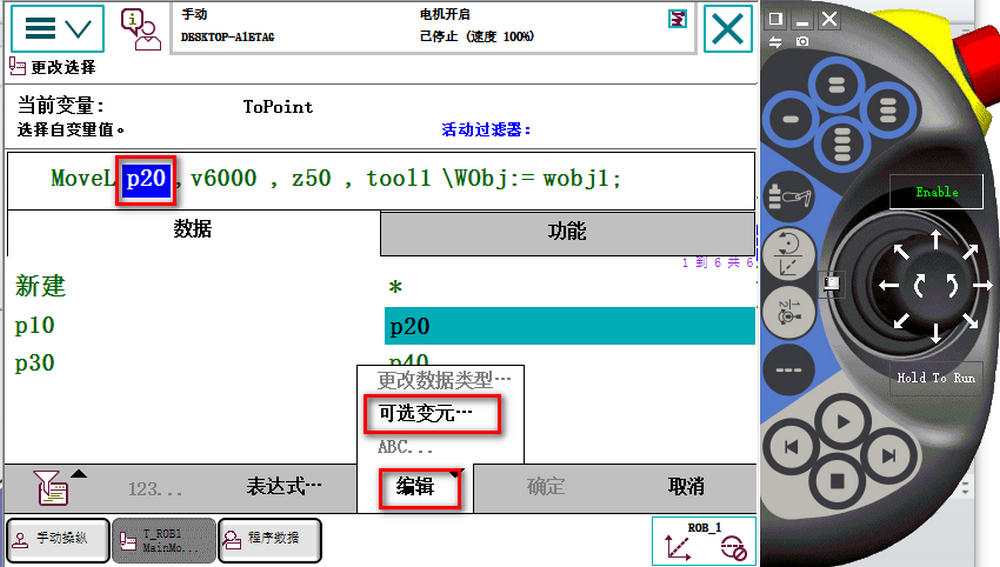
点击数据—-编辑—-ABC可以修改数据。
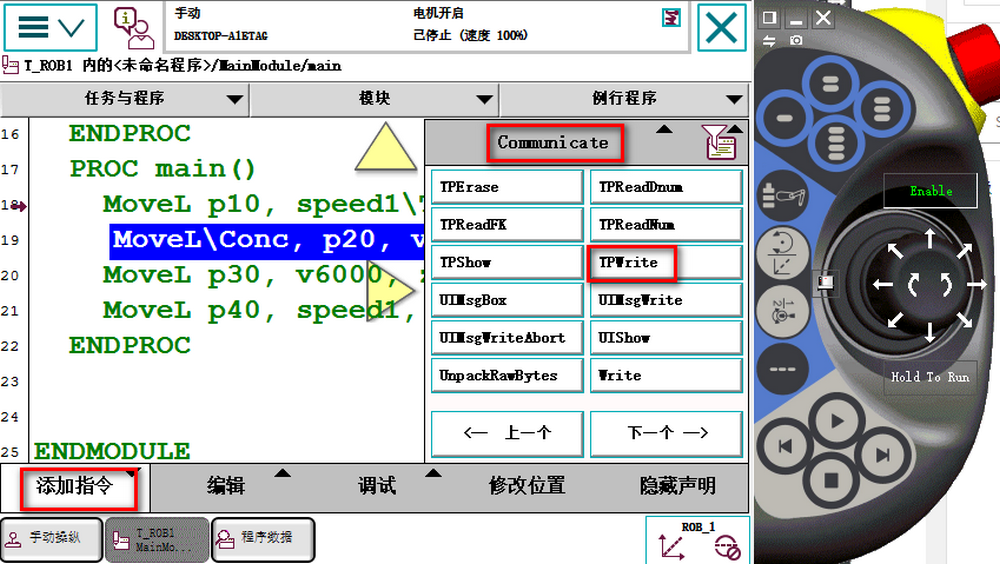
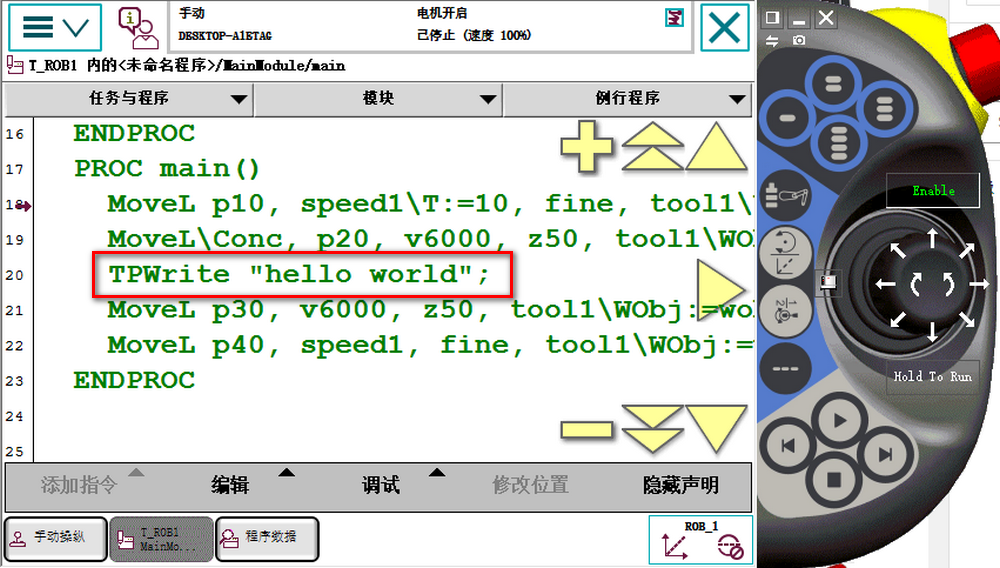
类似于中断,在行走的过程中打印信息。
此时发现MoveL指令已经变了。

在其下方插入一条指令。添加指令—-选择Communicate—-下一个中的TPWrite