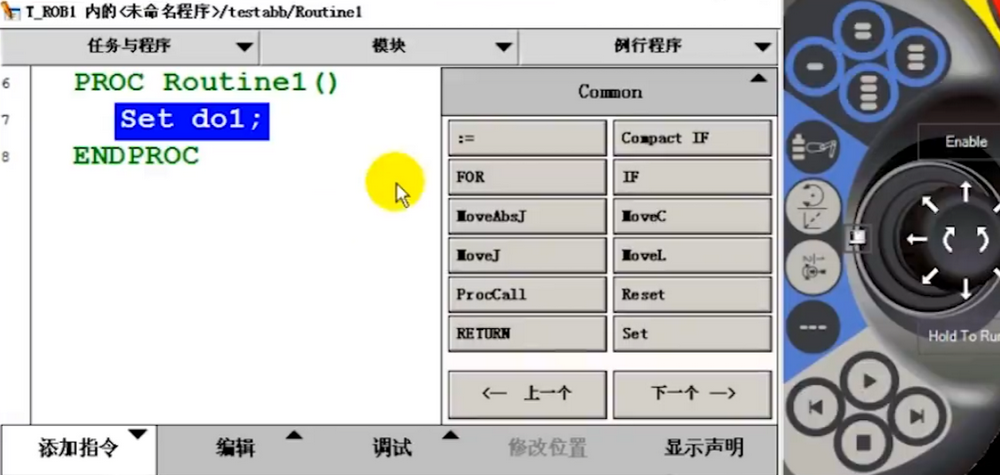
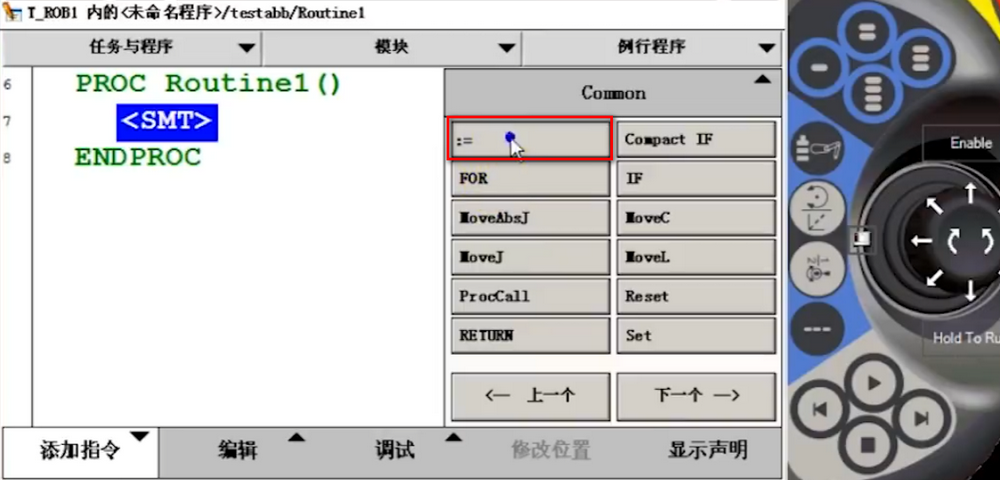
选中需要添加指令的位置,然后点击添加指令,此时显示的指令才是有效的。否则阴影显示不可用。

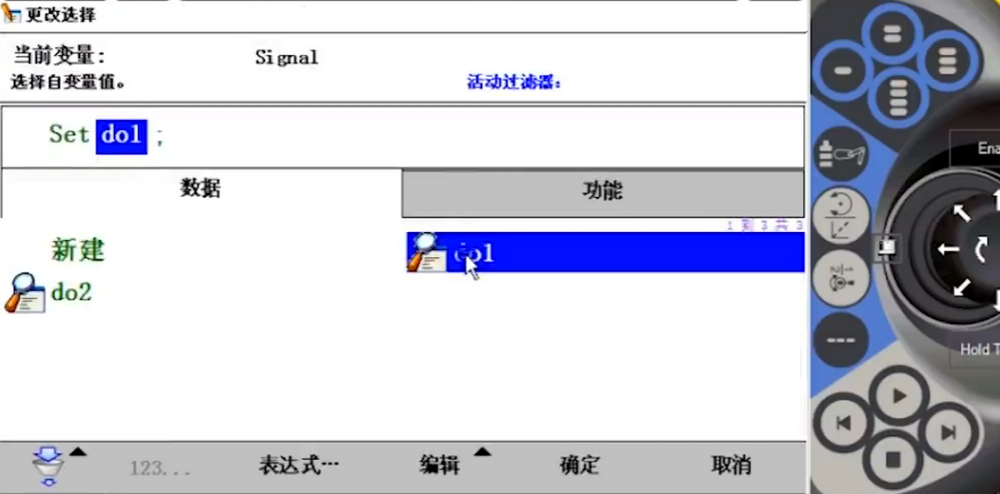
如选择Set指令,则会将do1给置1。
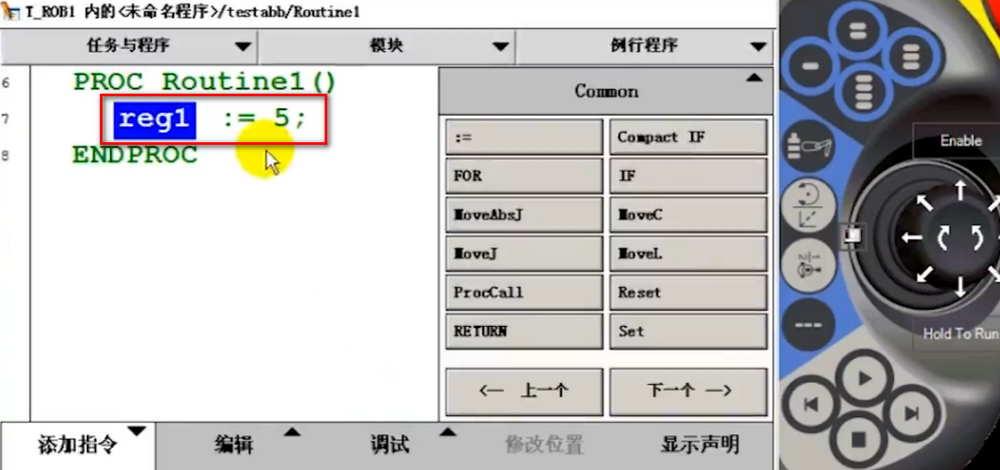
:= 赋值指令是用于对程序数据时行赋值,赋值可以是一个常量或数学表达式。如 reg1 :=5 ; reg2 := reg1+4; 此时选择赋值指令。
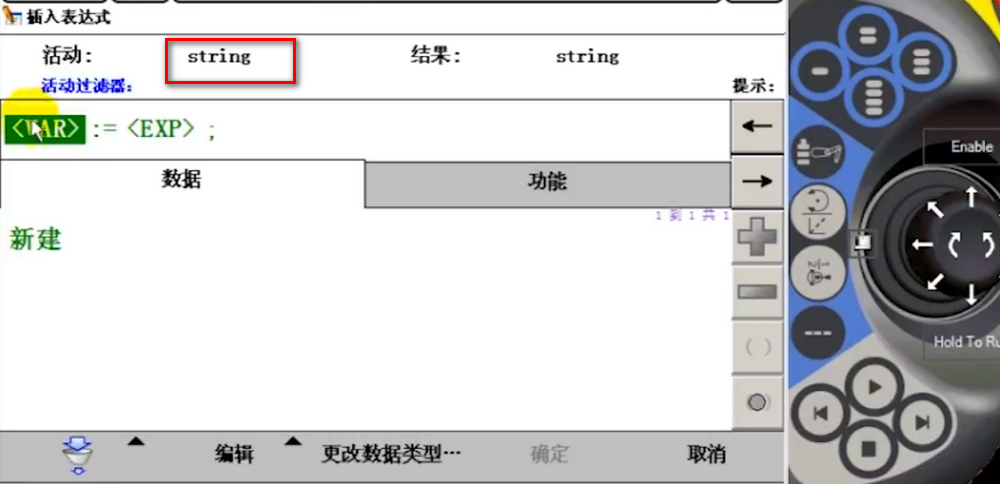
显示是string类型的,不是所需要的,此时点击更改数据类型….
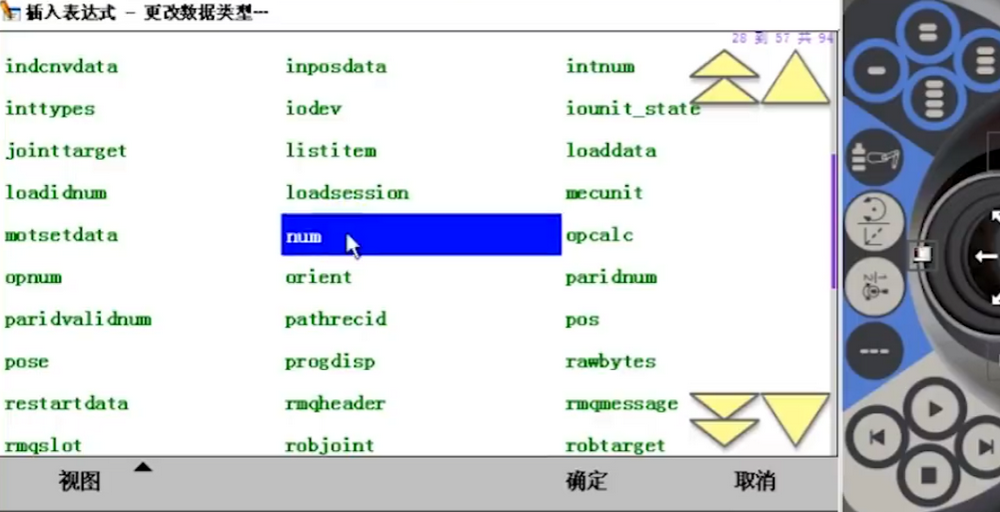
选择需要的num数据类型
选择需要的reg1变量
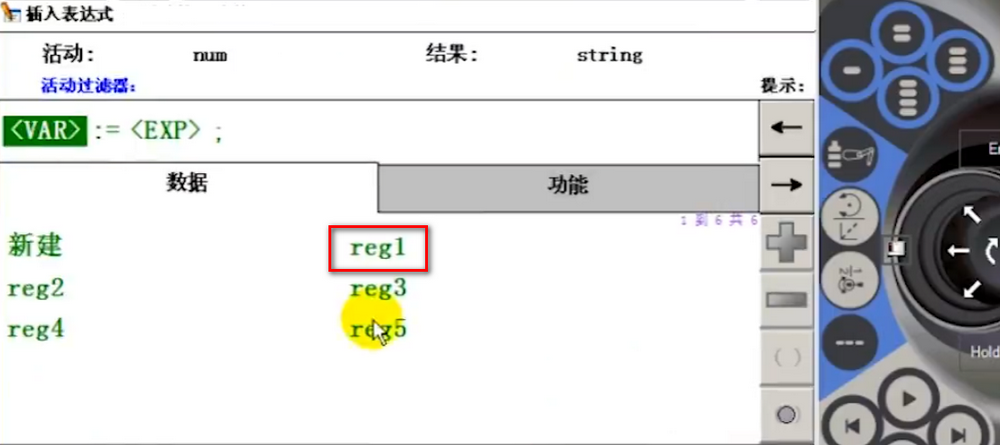
选择完reg1变量后,再选择要赋的值或表达式。点击编辑—-仅限选定内容—–输入数字5。
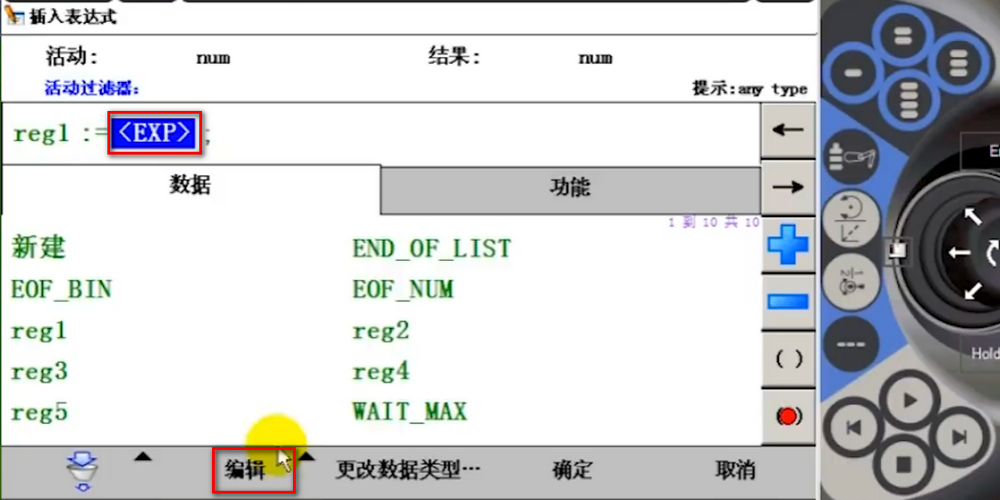
这样reg1:=5 赋值就成功了。
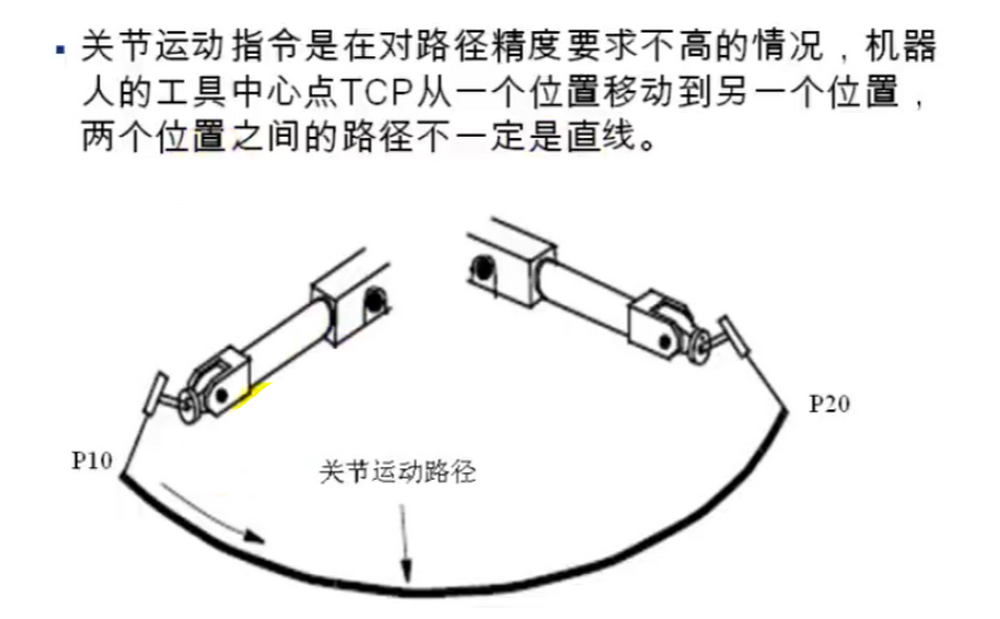
机器人在空间中进行运动主要是四种方式,关节运动【MOVEJ】,线性运动【MOVEL】,圆弧运动【MOVEC】和绝对位置运动【MOVEABSJ】。

在common工具栏中选择MoveAbsJ指令,星号代表未知数据,v1000表示每秒1000mm,Z50是转弯半径的设定。

可以使用星号能很快的使各个关节轴归零,选中星号——-调试—–查看值。
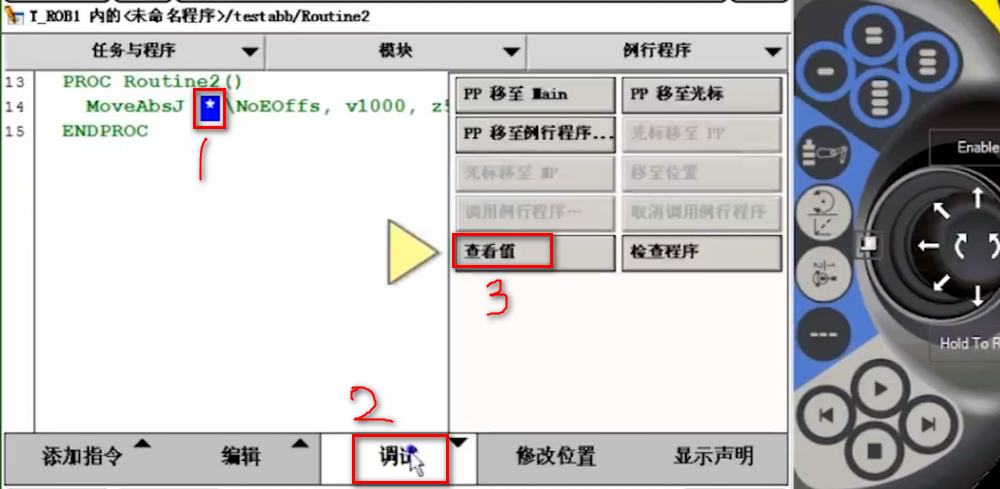
把这6个轴的值都指定成0,当执行MoveAbsJ指令的时候6个轴也就都归0了,很是方便。

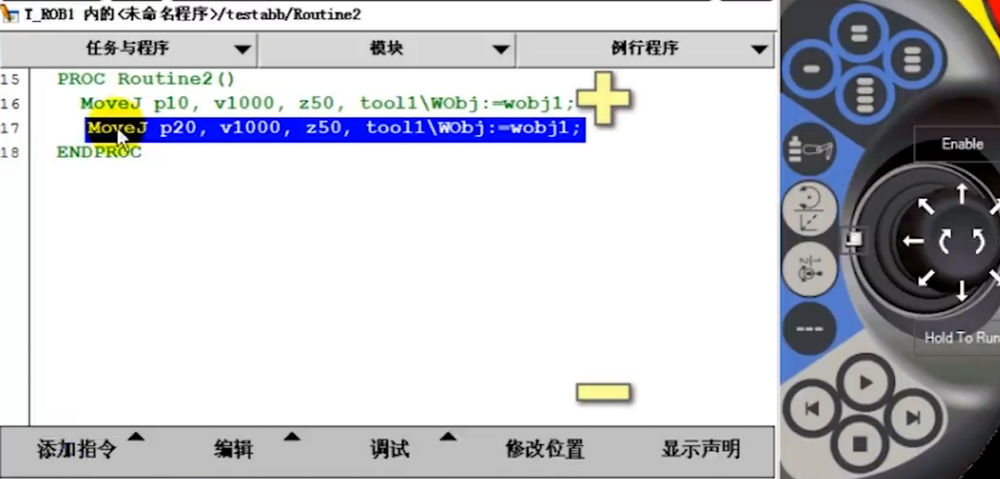
在common工具栏中选择MoveJ指令,选中星号
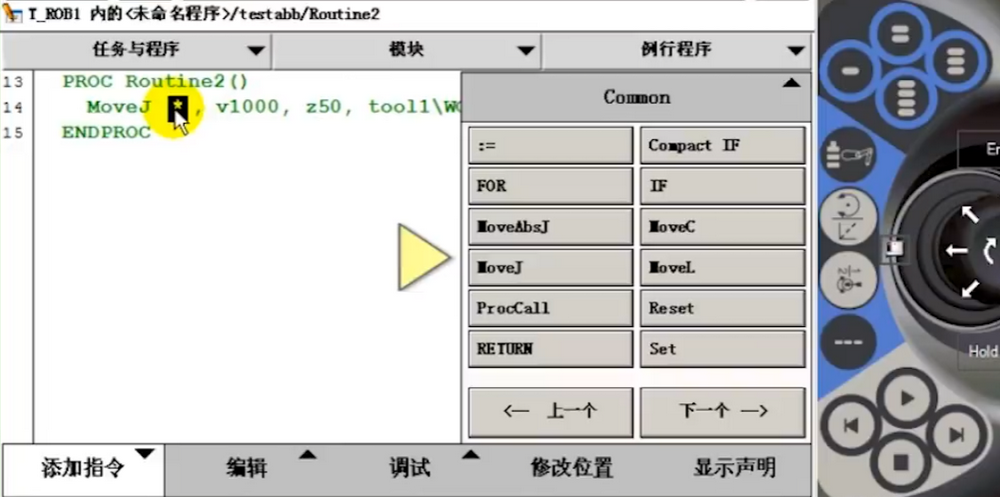
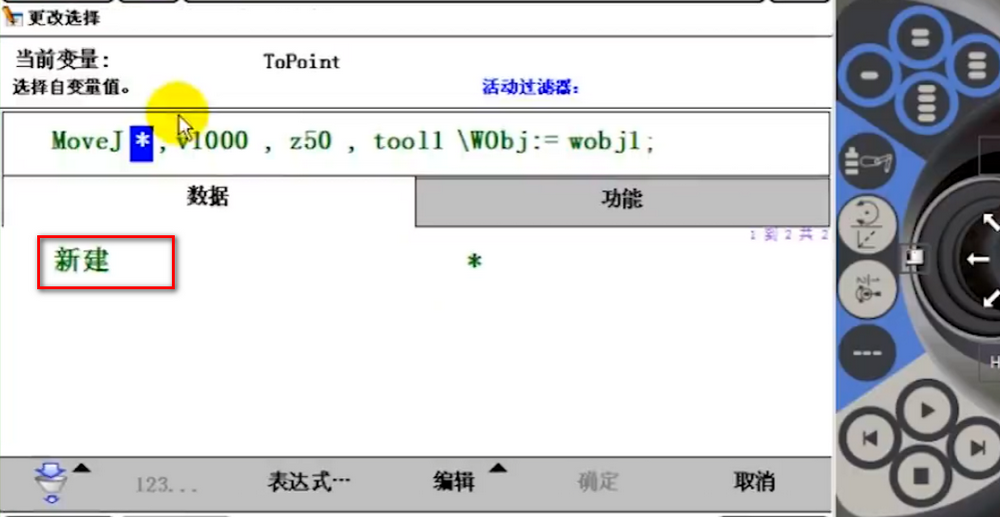
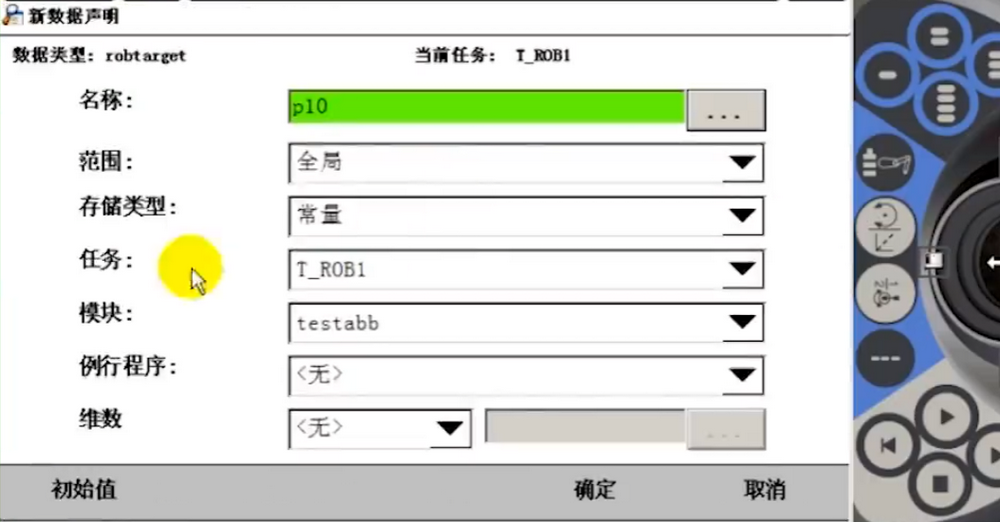
此时如果点击修改位置,就把当前的位置修改到P10中去了。