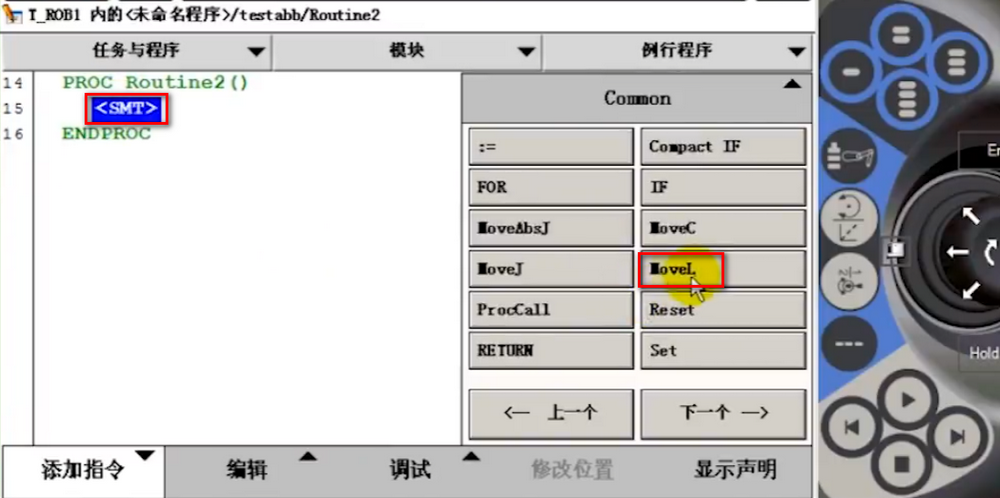
首先选中要添加MoveL指令的地方,在Common命令面板中选择MoveL,
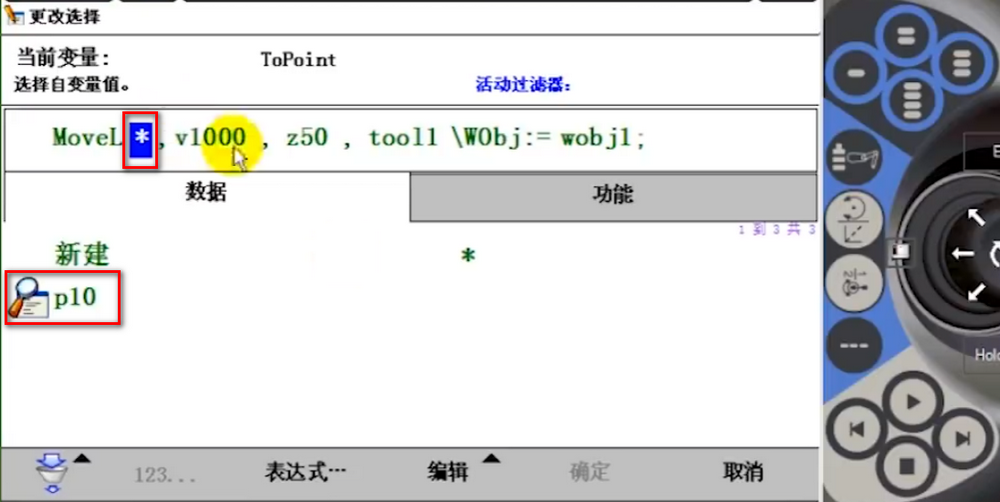
将星号命个名字,选中星号点新建或选择p10都可以,
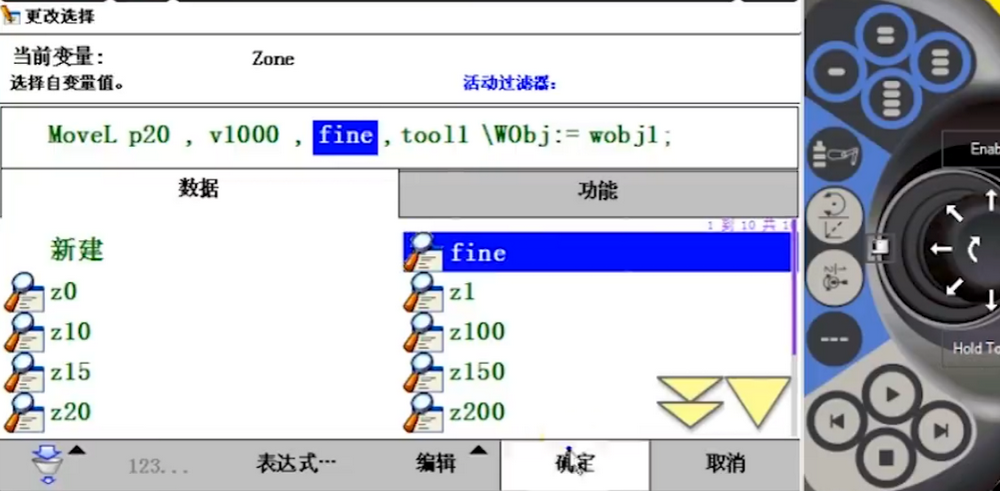
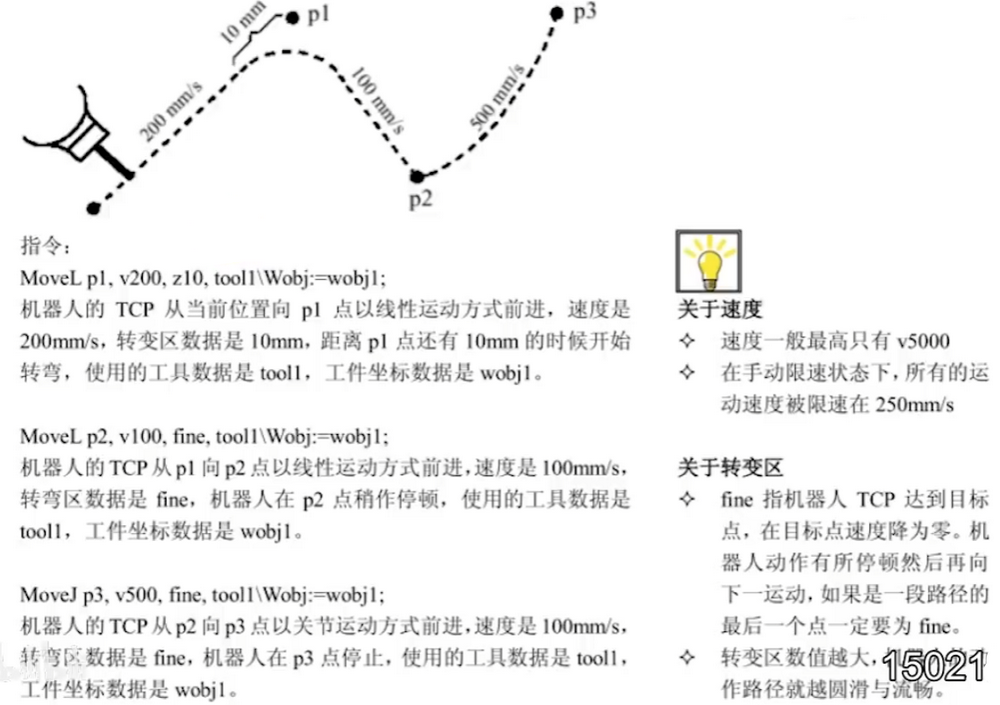
在一个程序结束最后一个移动指令,则必须将Z50改为fine
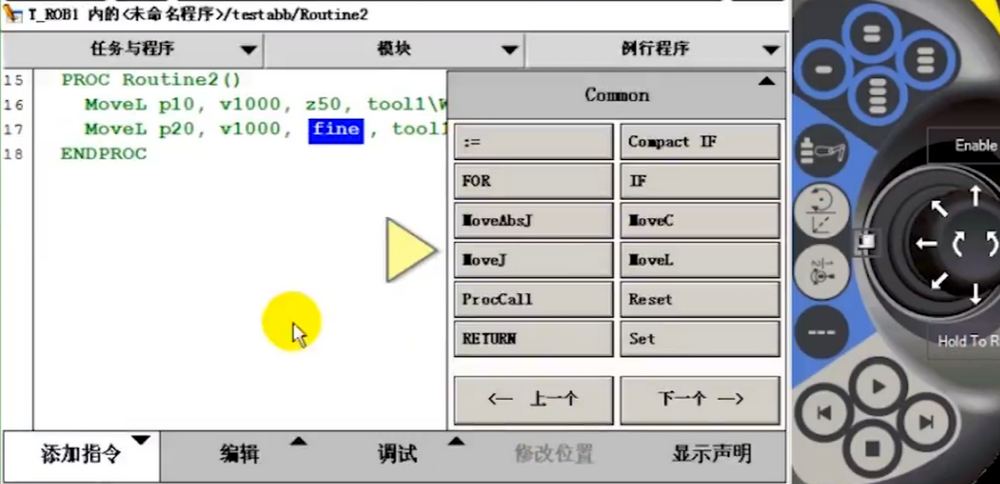
线性运动是机器人的TCP从起点到终点之间的路径始终保持为直线,一般如焊接,涂胶等应用对路径要求高的场合进行使用此指令。
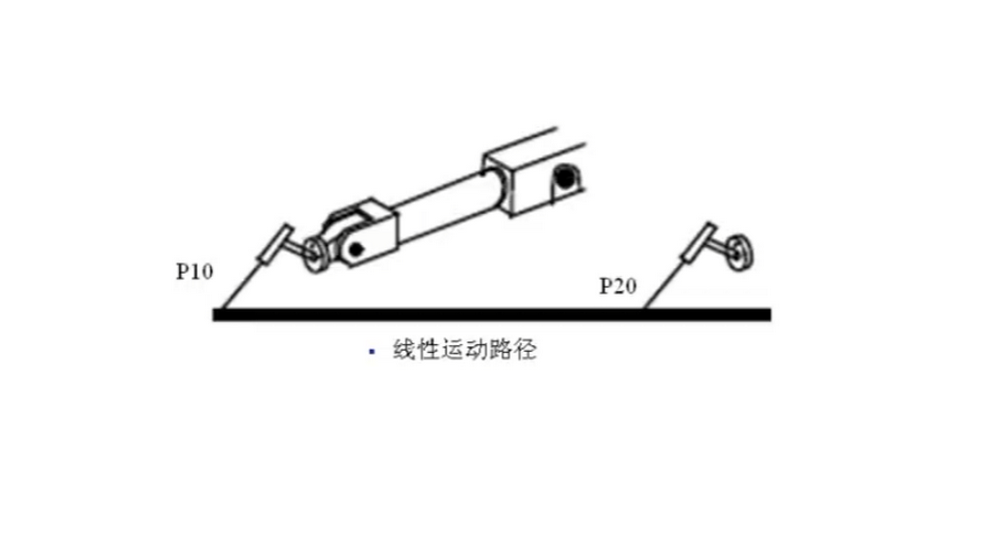
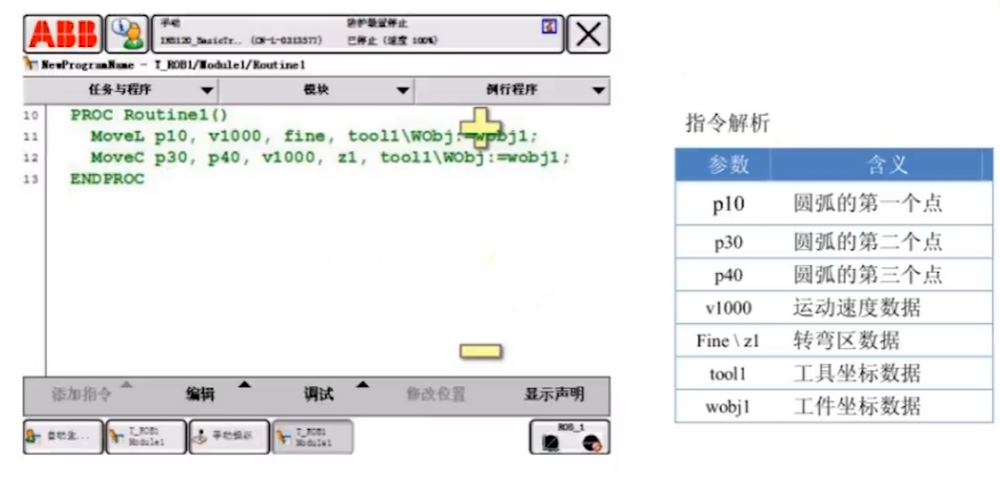
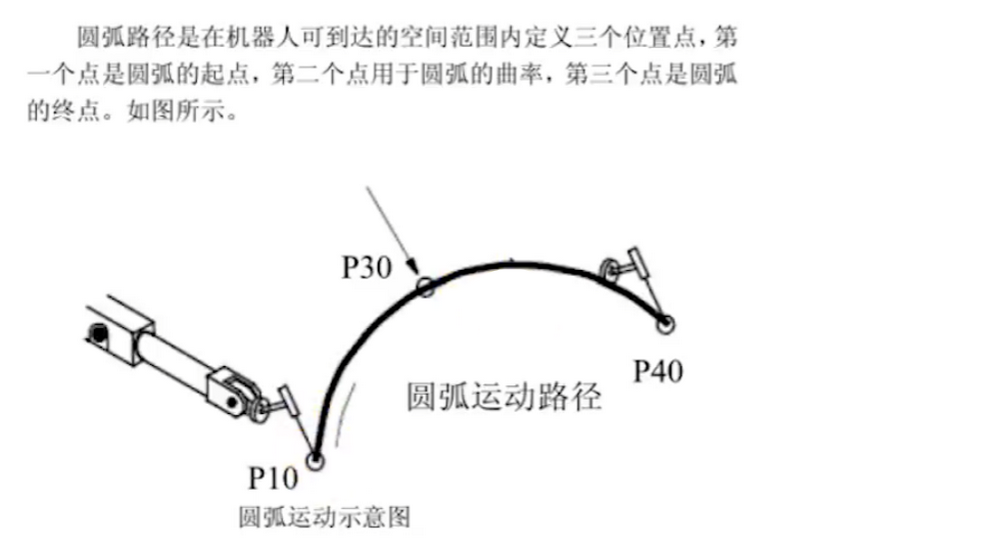
圆弧运动指令
一个综合案例
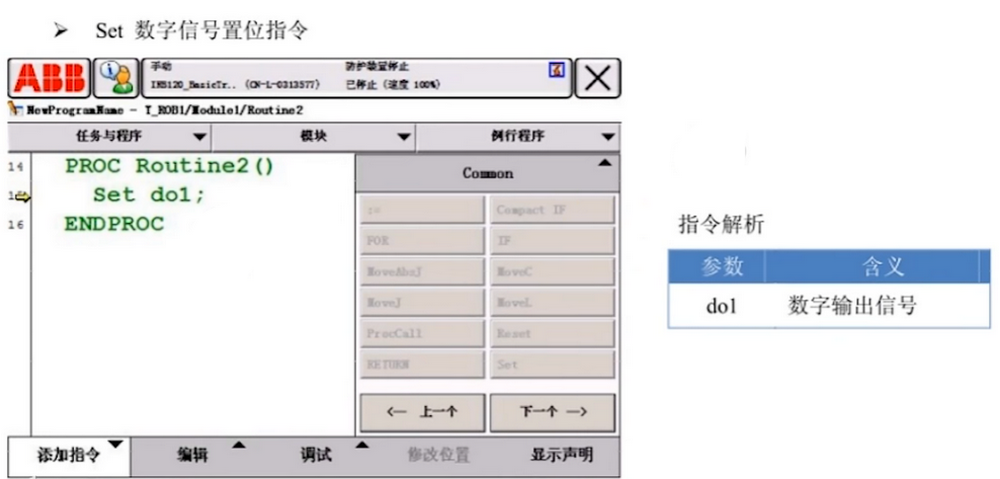
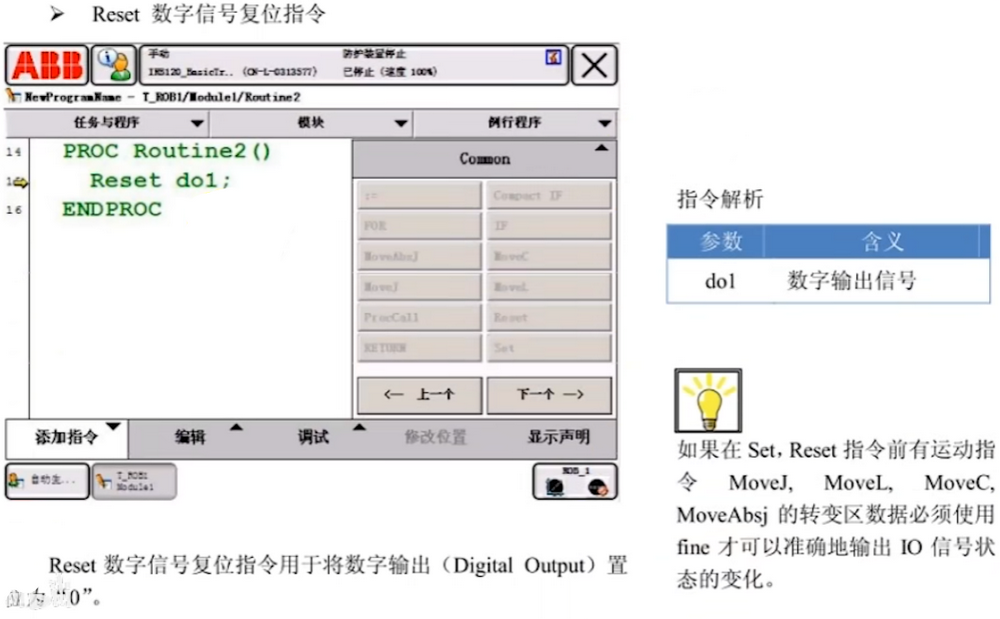
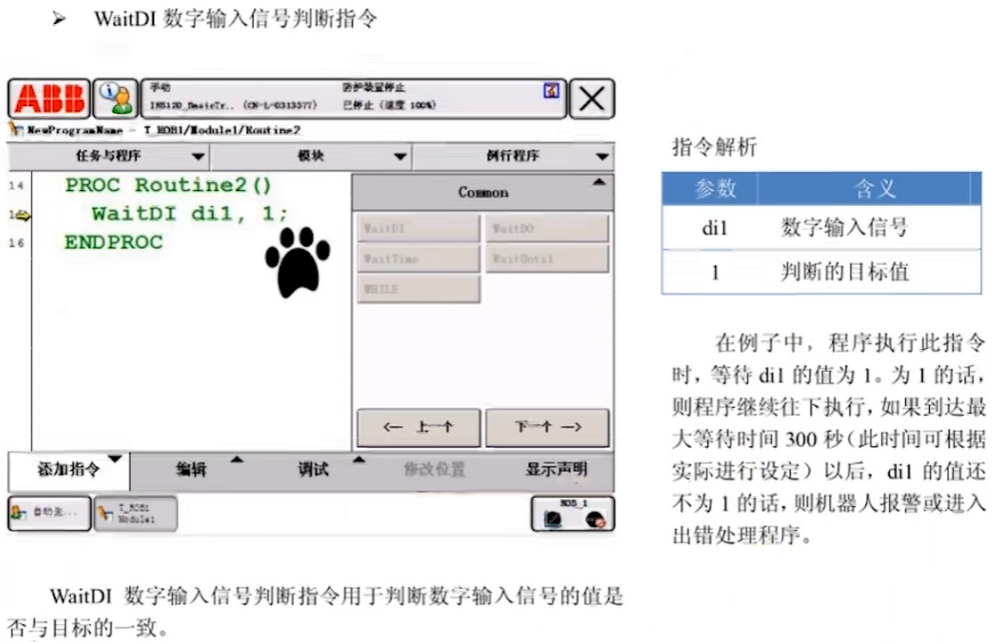
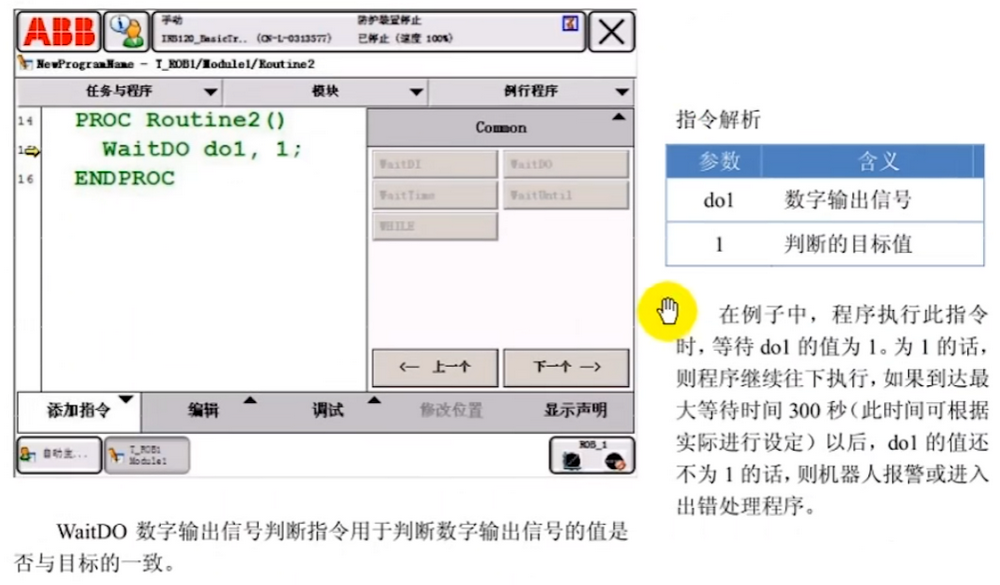
IO控制指令用于控制IO信号,以达到与机器人周边设备进行通讯的目的。

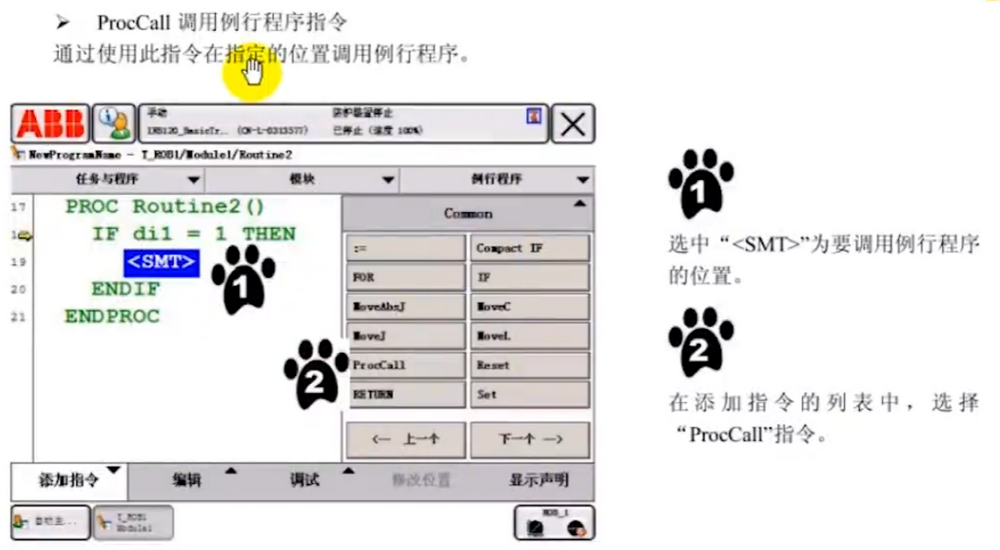
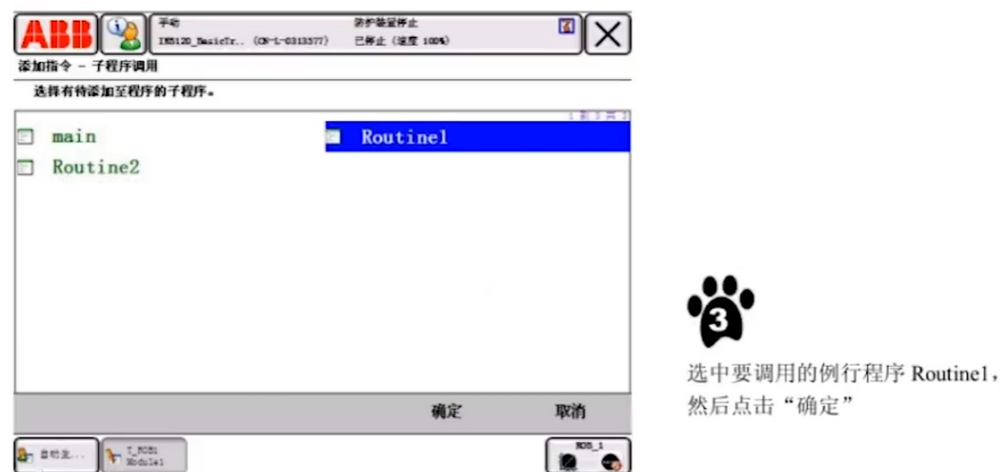
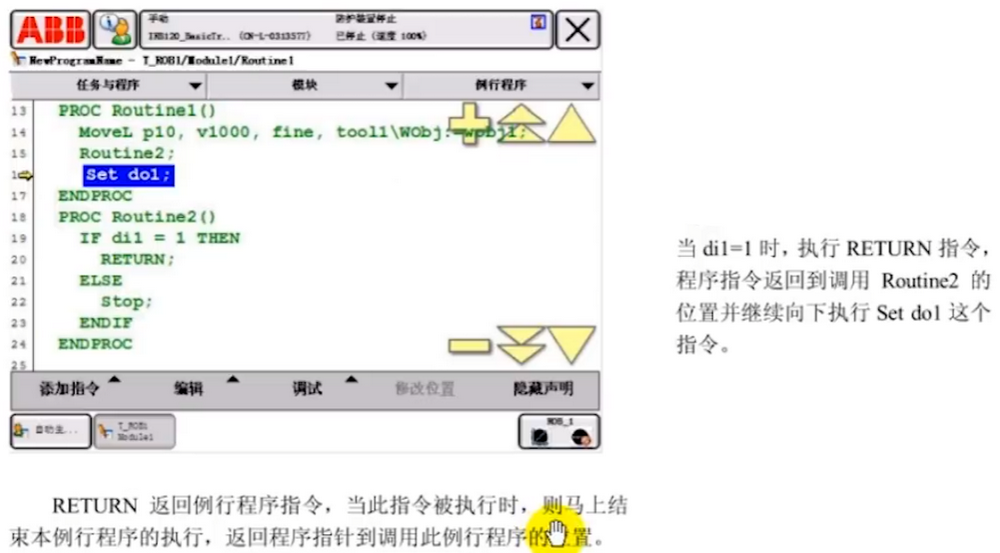
调用例行程序指令

首先选中要添加MoveL指令的地方,在Common命令面板中选择MoveL,
将星号命个名字,选中星号点新建或选择p10都可以,
在一个程序结束最后一个移动指令,则必须将Z50改为fine
线性运动是机器人的TCP从起点到终点之间的路径始终保持为直线,一般如焊接,涂胶等应用对路径要求高的场合进行使用此指令。
圆弧运动指令
一个综合案例
IO控制指令用于控制IO信号,以达到与机器人周边设备进行通讯的目的。
调用例行程序指令