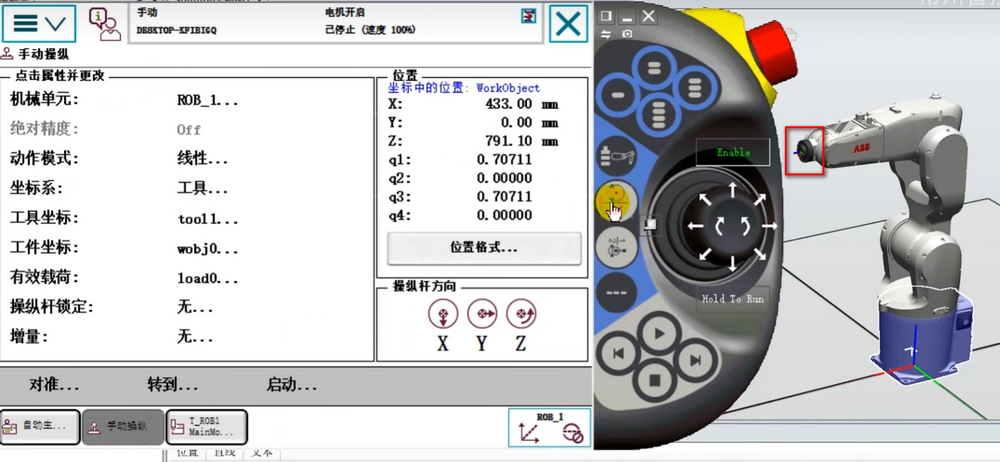
机器人手动操纵的线性运动
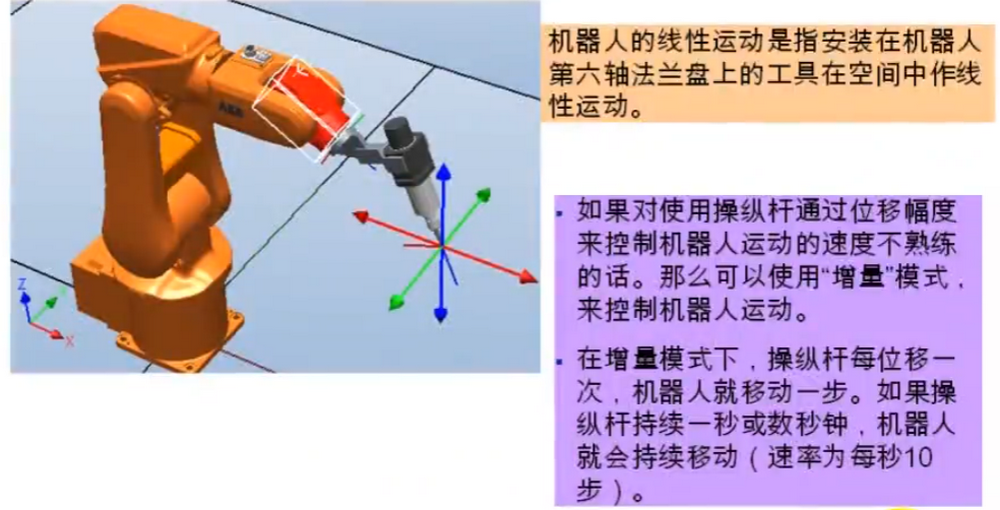
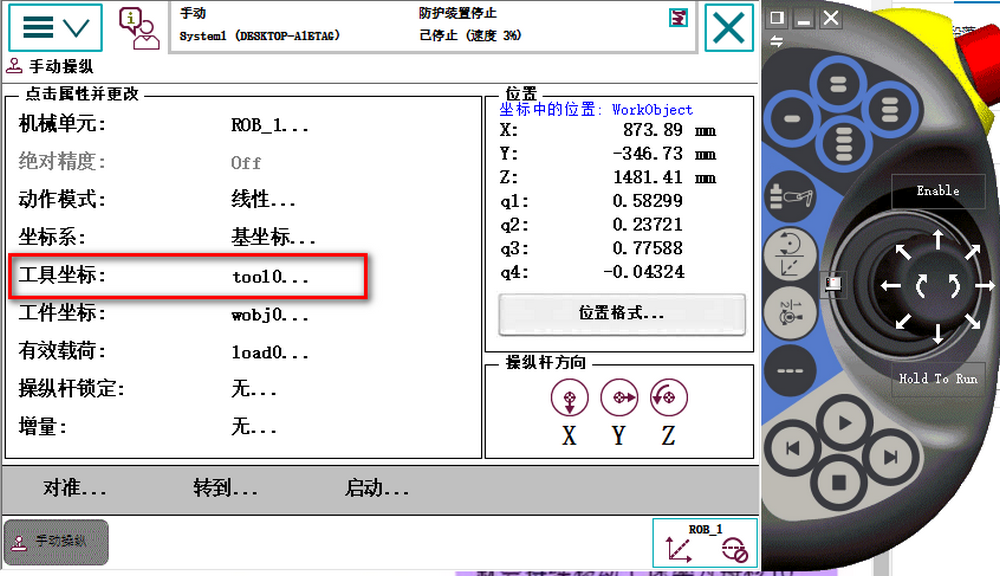
在手动操纵选择线性运动。

在线性中选择工具坐标 tool0…
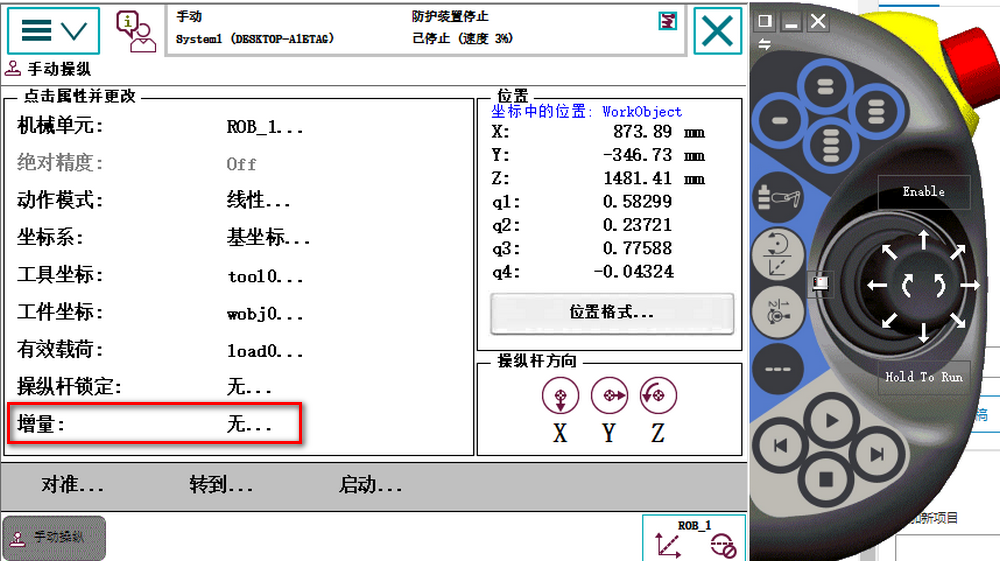
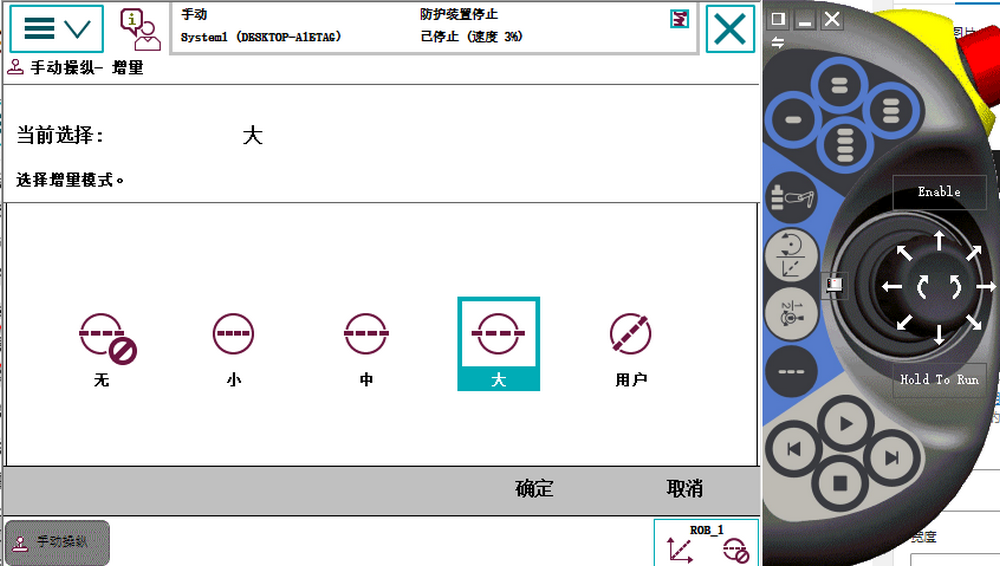
如果对操纵杆不能很好的操作,可以使用增量来操作这样更加简单一点。这样摇杆的摆幅并不与速度挂钩,与增量相关。
当操作示教器提示靠近奇点报错时,只要把5轴调低一点就可以了。
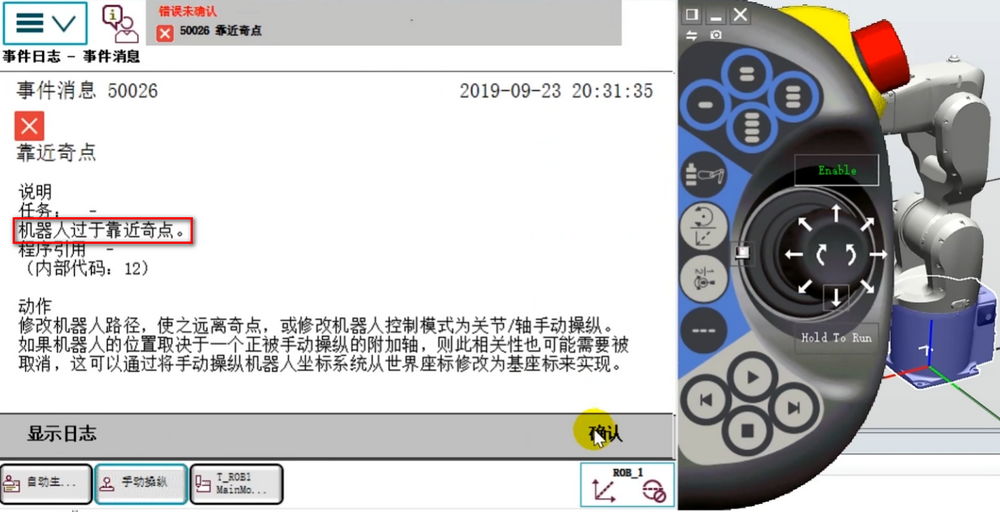
此时5轴是处于奇点状态。

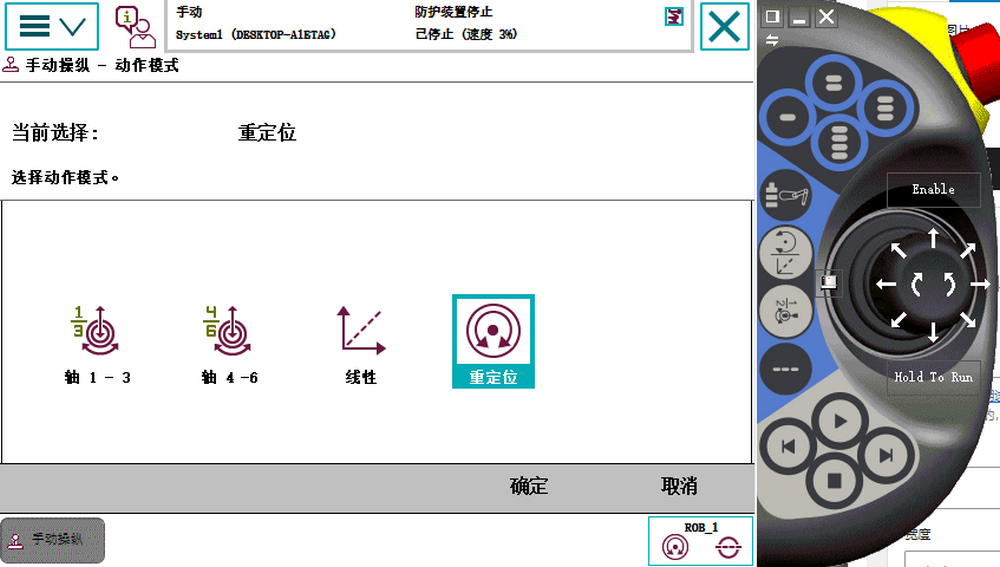
ABB机器人手动操纵重定位运动。法兰盘工具的TCP中心点在空间中围绕坐标系旋转的运动。


手动操作的动作模式改为重定位。
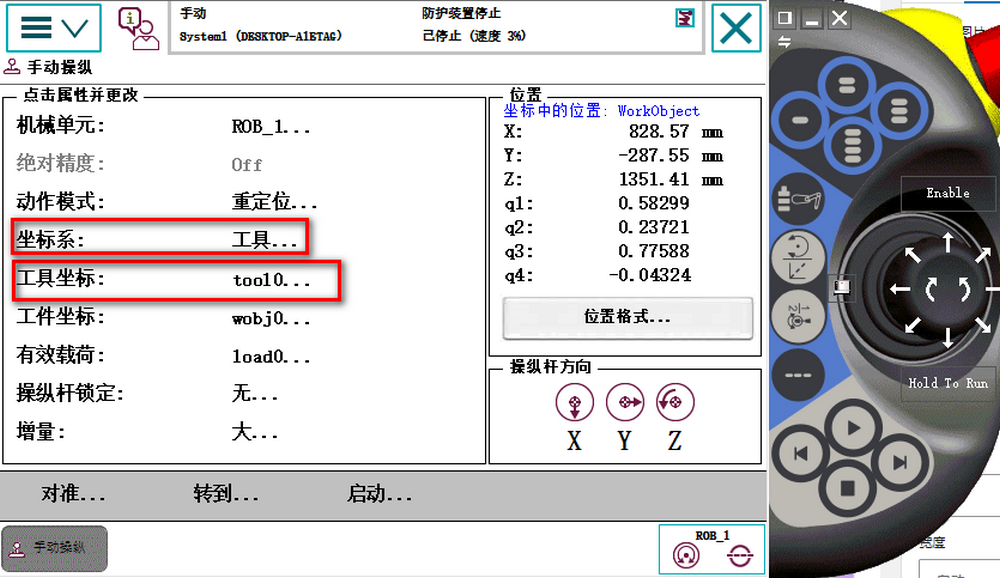
工具坐标系选择在六轴法兰盘上安装的工具。
机器人手动操纵的线性运动
在手动操纵选择线性运动。
在线性中选择工具坐标 tool0…
如果对操纵杆不能很好的操作,可以使用增量来操作这样更加简单一点。这样摇杆的摆幅并不与速度挂钩,与增量相关。
当操作示教器提示靠近奇点报错时,只要把5轴调低一点就可以了。
此时5轴是处于奇点状态。
ABB机器人手动操纵重定位运动。法兰盘工具的TCP中心点在空间中围绕坐标系旋转的运动。
手动操作的动作模式改为重定位。
工具坐标系选择在六轴法兰盘上安装的工具。