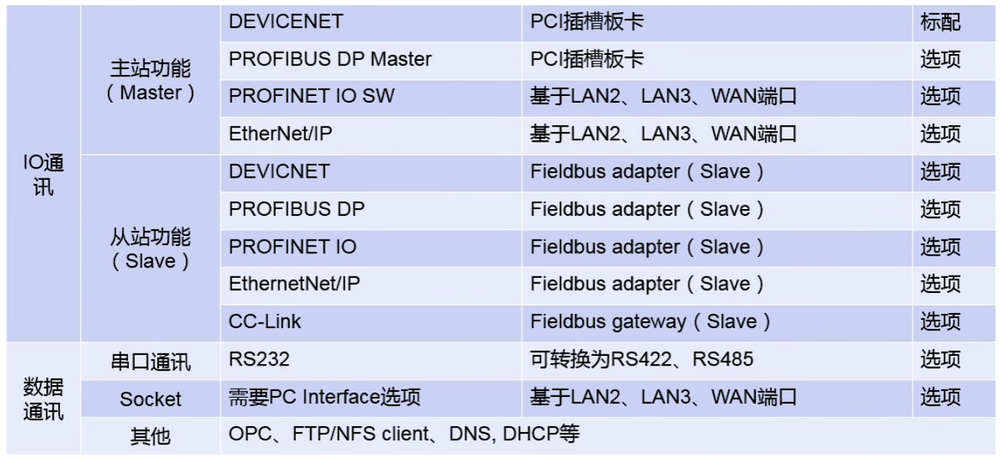
ABB机器人常用的通讯协议
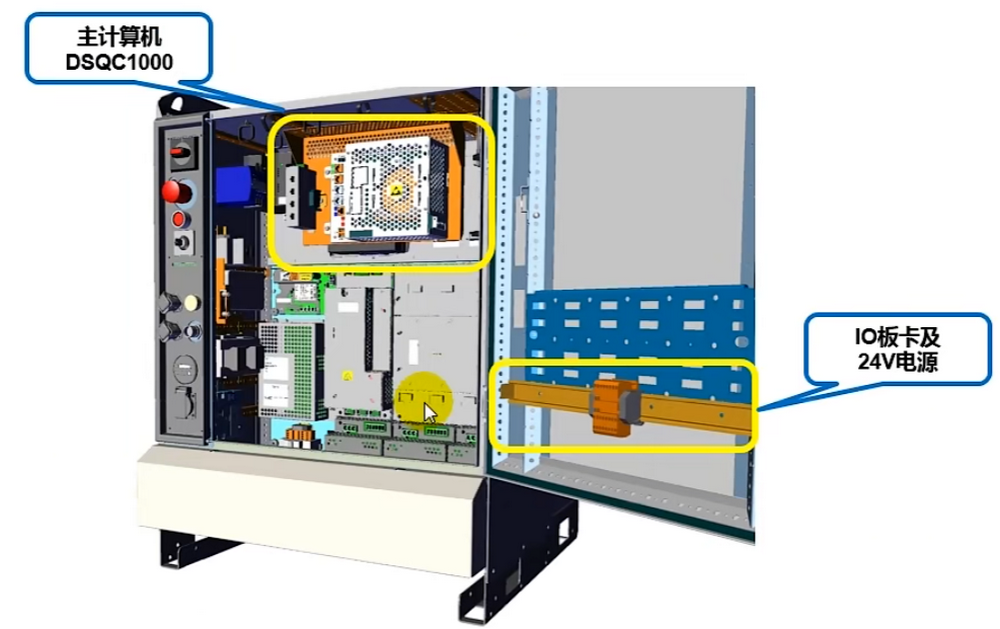
通讯板卡的硬件相关知识—-控制柜的功能组成。
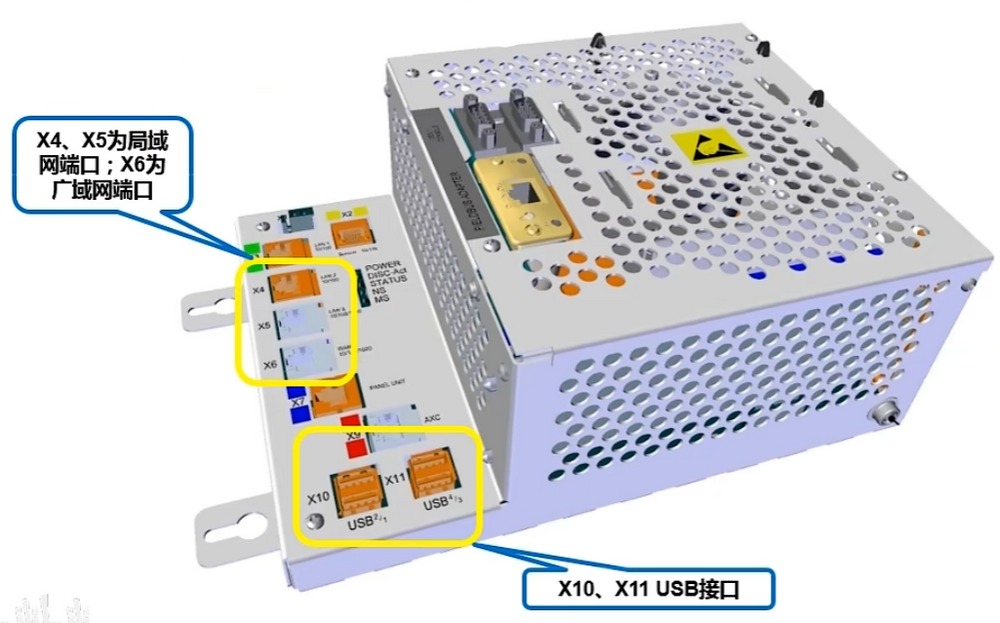
主计算机的通讯接口X4,X5局域网端口通常用于视觉链接,焊接设备链接等。X6为广域网端口通常用于将工业机器人链接到工厂网络。X10一般用于外部的USB连接,X11一般内部使用。
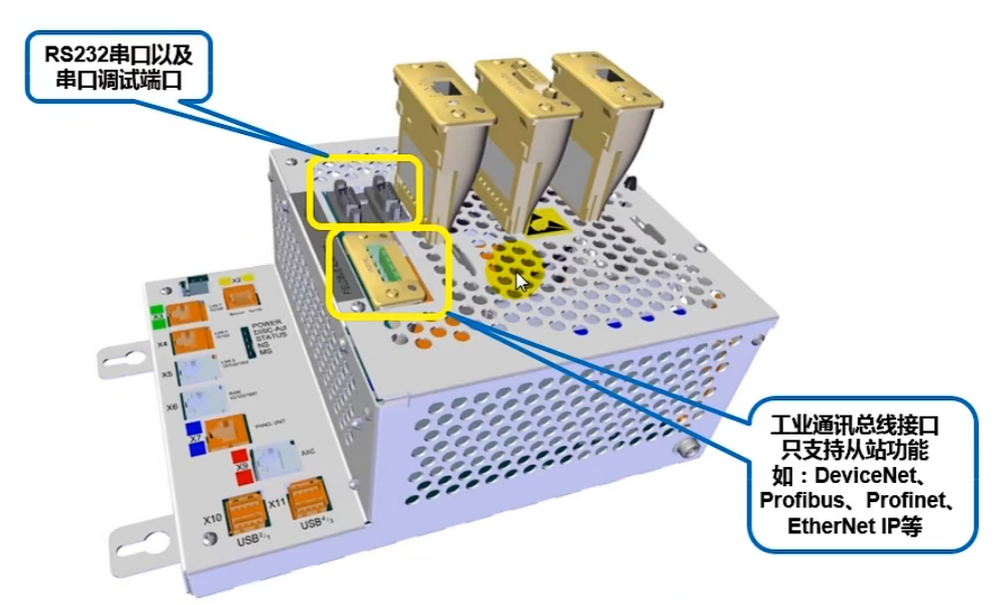
RS232串口一般用于串口调试,标准的通讯总线接口等。
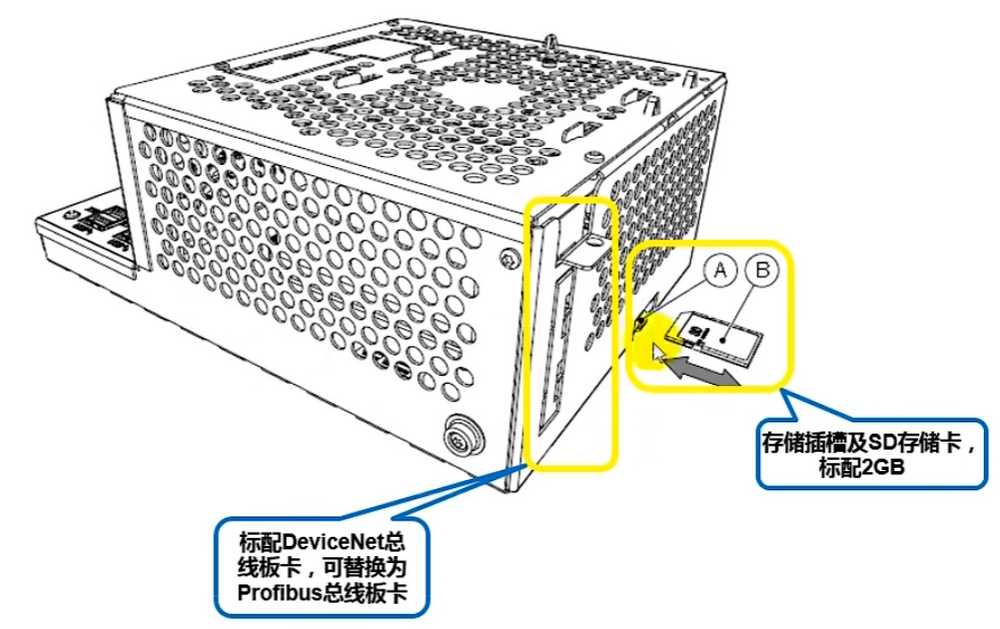
总线板卡及SD存储卡。标配的DeviceNet总线板卡。
ABB机器人常用的通讯协议
通讯板卡的硬件相关知识—-控制柜的功能组成。
主计算机的通讯接口X4,X5局域网端口通常用于视觉链接,焊接设备链接等。X6为广域网端口通常用于将工业机器人链接到工厂网络。X10一般用于外部的USB连接,X11一般内部使用。
RS232串口一般用于串口调试,标准的通讯总线接口等。
总线板卡及SD存储卡。标配的DeviceNet总线板卡。