要求:一台机器人,机器人从P10点开 始绘制长77mm,宽52mm,并在每个点停留0.2秒。机器人从原点位置开始,结束后自动回到原点。
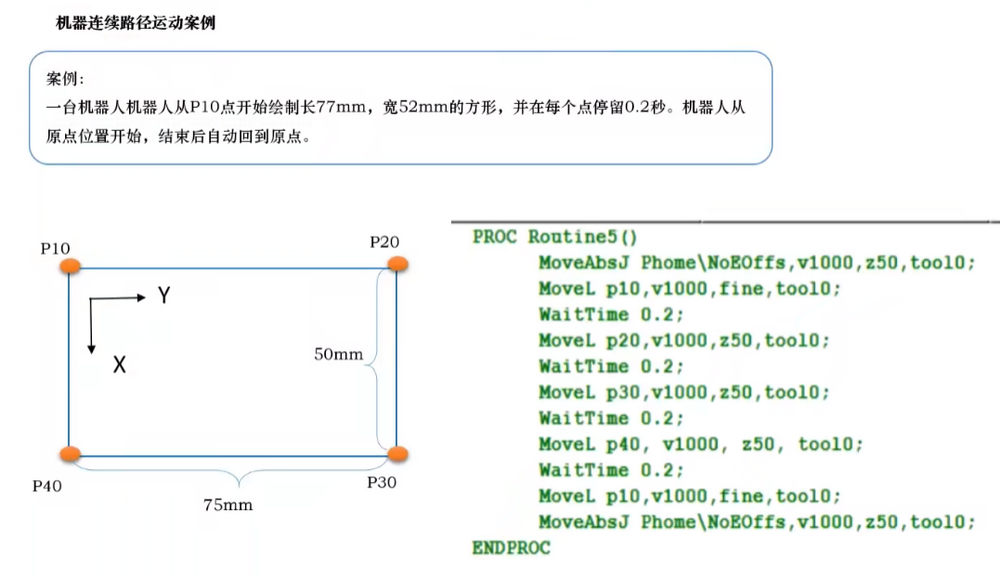
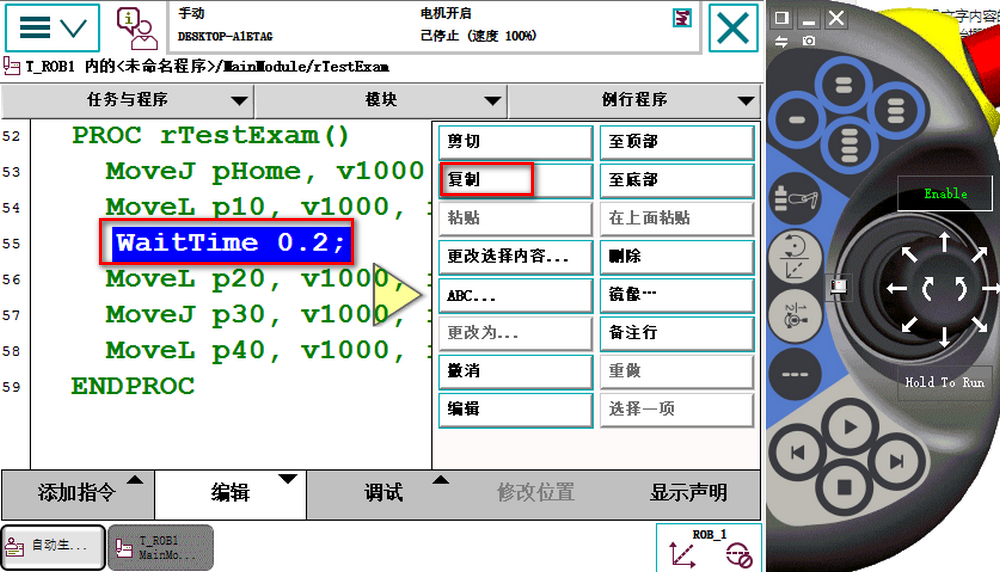
添加每个点停留0.2秒;选择在运动行的下方—-添加指令—WaitTime


如果每一个行都需要执行,可以进行复制粘贴操作。
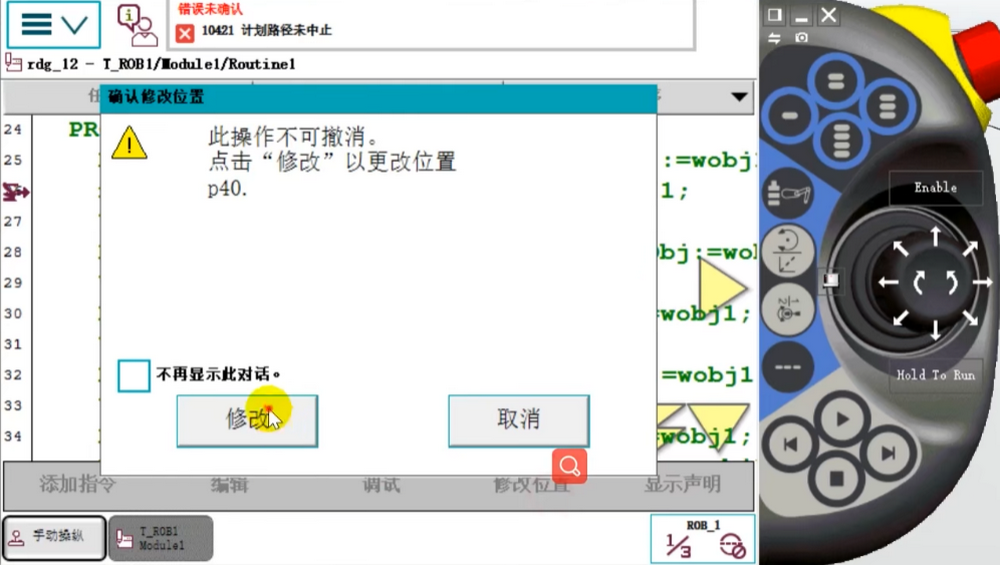
对P10,P20,P30,P40,pHome点进行修改定位的示教。
要求:一台机器人,机器人从P10点开 始绘制长77mm,宽52mm,并在每个点停留0.2秒。机器人从原点位置开始,结束后自动回到原点。
添加每个点停留0.2秒;选择在运动行的下方—-添加指令—WaitTime
如果每一个行都需要执行,可以进行复制粘贴操作。
对P10,P20,P30,P40,pHome点进行修改定位的示教。