以库向导的方式填内容:
1、西门子S7-200 + EM253融合–>Smart库; 2、脉冲:Q0.1, 方向:Q0.2;3、反限位【I1.1】,正限【I1.0】位,原点【I1.2】根据实际接线;
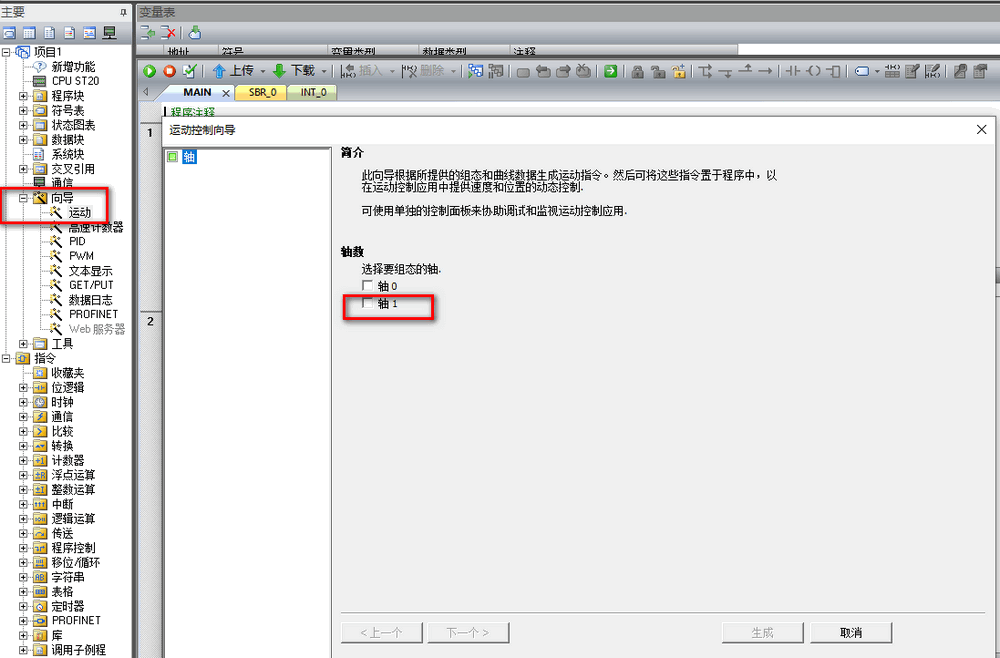
选择用Q0.1发脉冲,其中轴0是Q0.0, 轴1是Q0.1,轴2是Q0.3
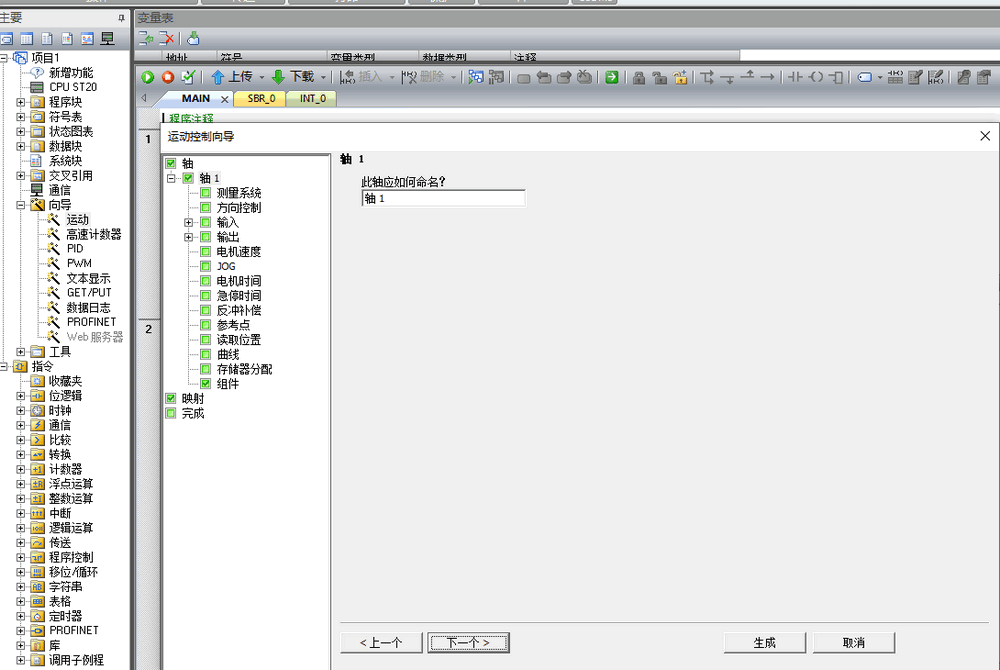
可以更改名称
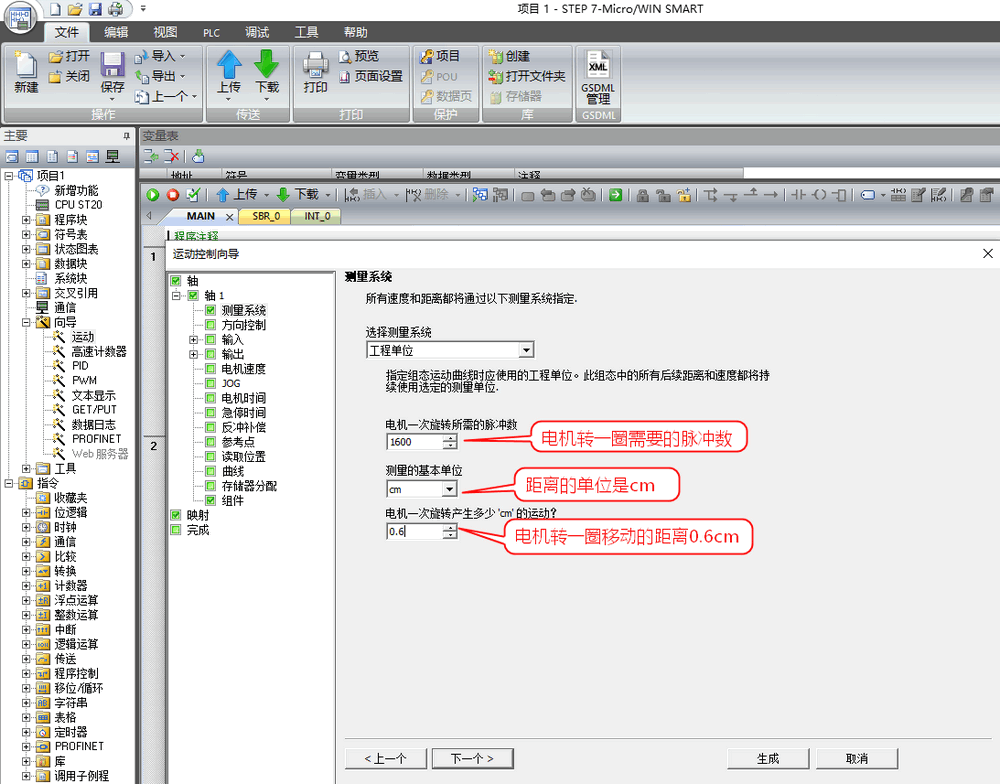
工程单位:
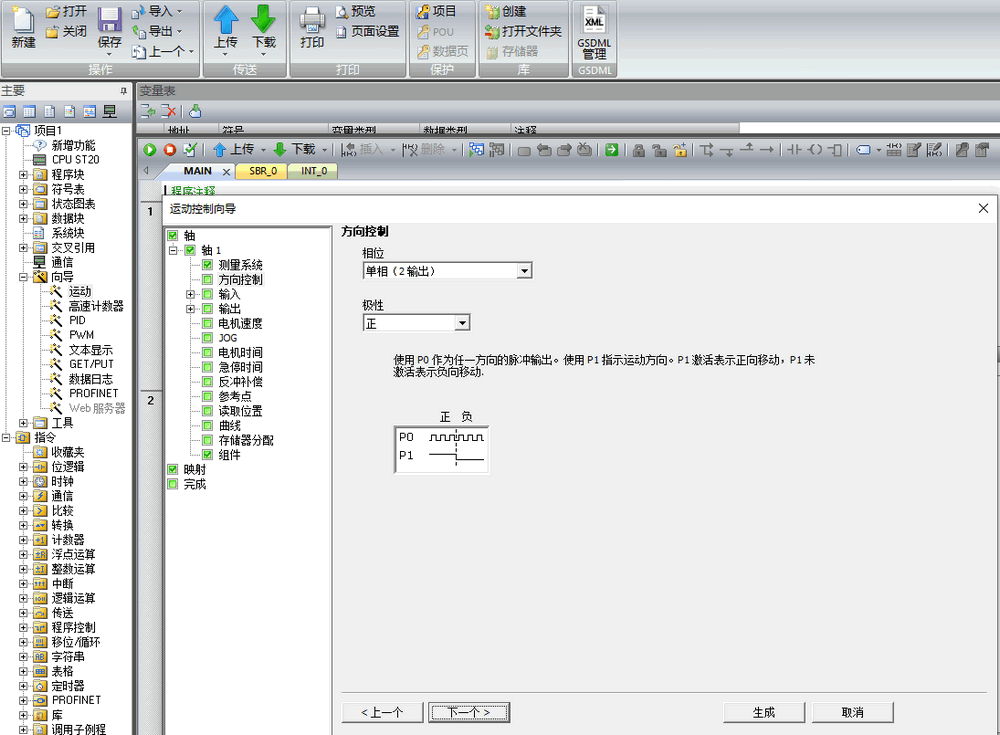
单相2输出:表示Q0.1发脉冲,另一个Q点表示方向,比如Q0.2即Q0.2得电是一个方向,Q0.2失电是一个方向。
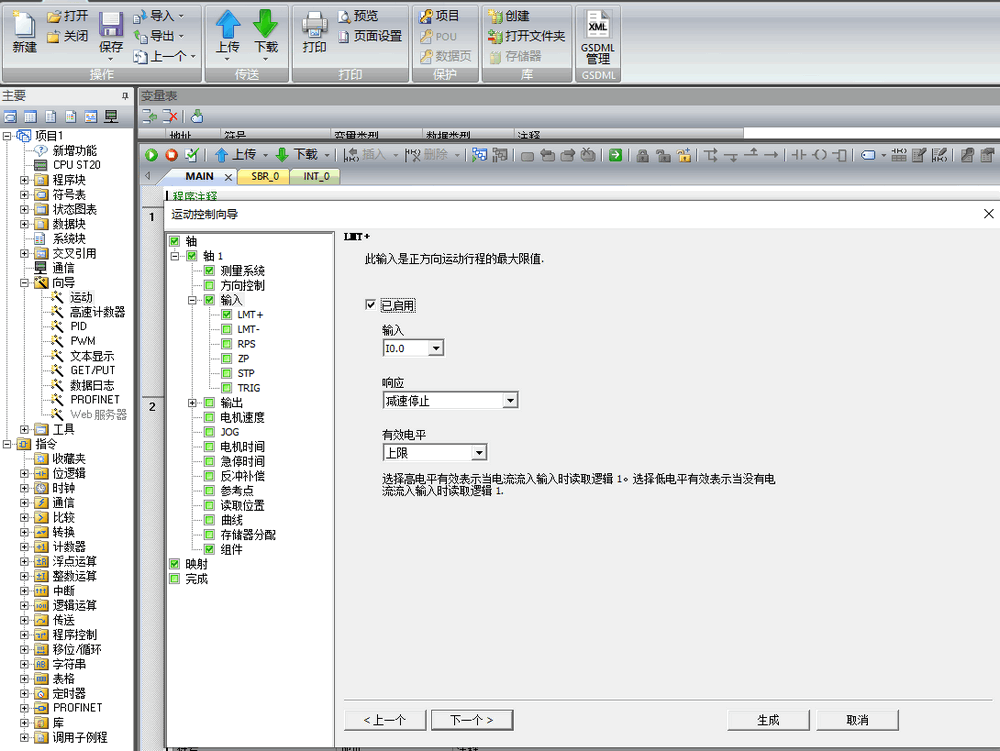
正向限位I0.0, 当碰到I0.0的上升沿时减速停止。
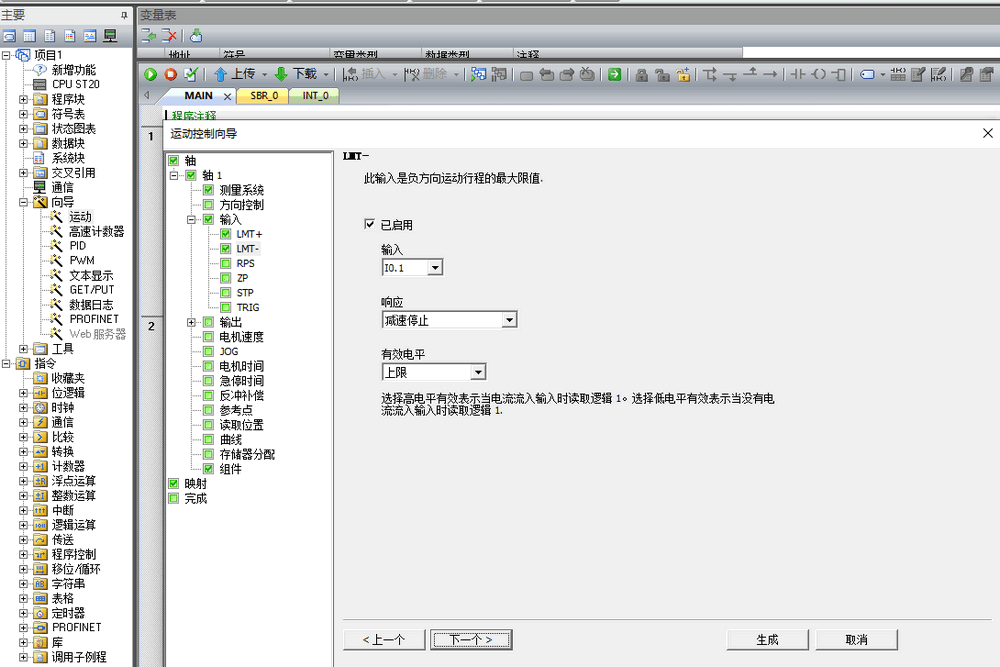
反向限位I0.1, 当碰到I0.1的上升沿时减速停止。
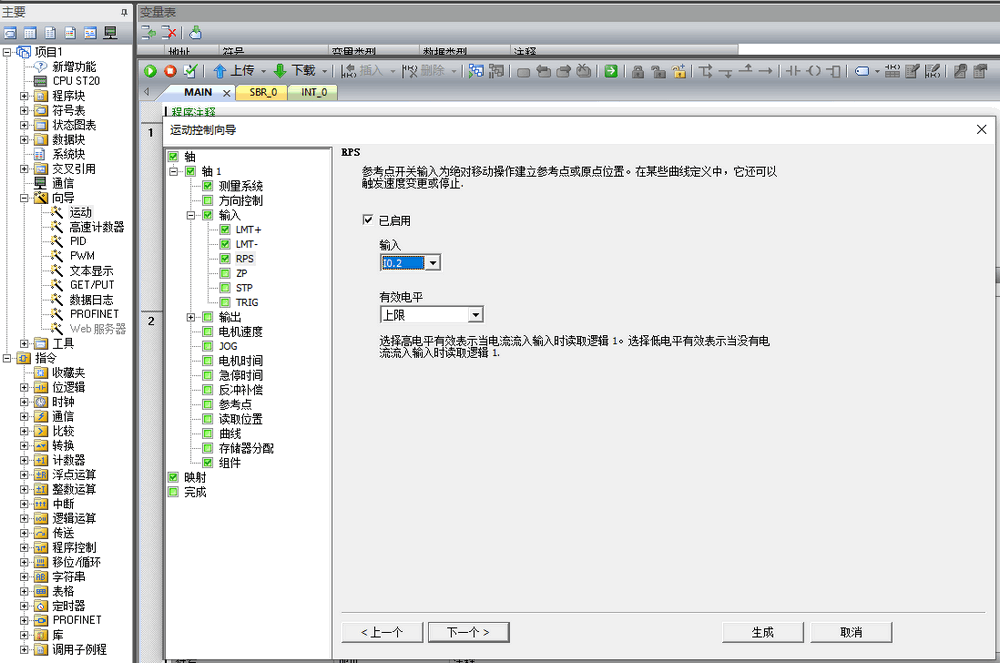
原点限位I0.2, 当碰到I0.2的上升沿时为原点。
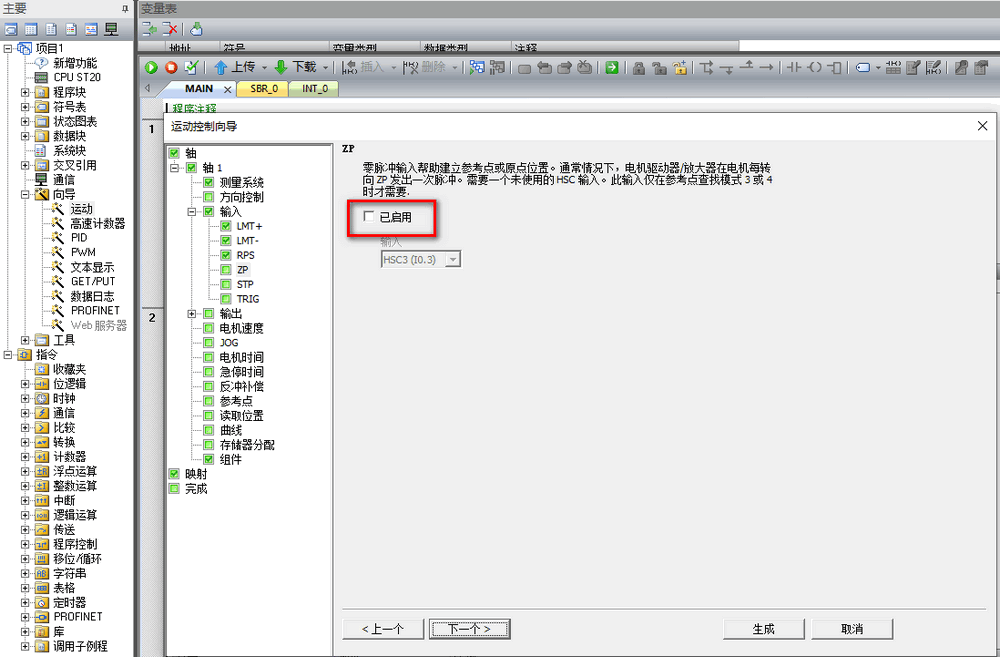
ZP零脉冲一般不选,针对伺服电机驱动器或者步进驱动器上有零脉冲口的才可以用。
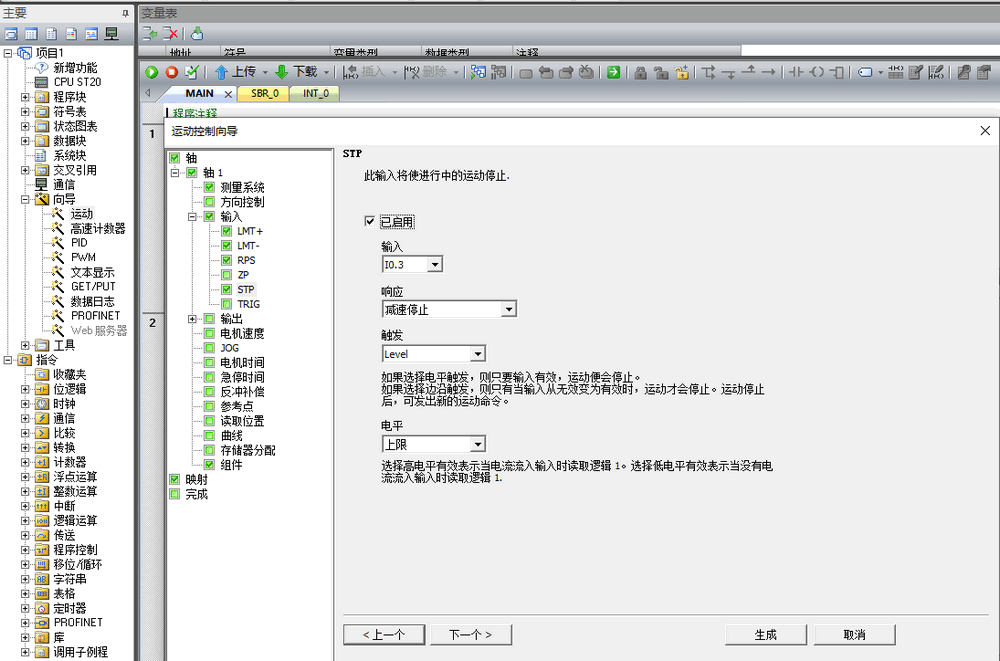
停止I0.3,可以用电平触发Level,也可以用沿触发edge,可以选上升沿或下降沿。
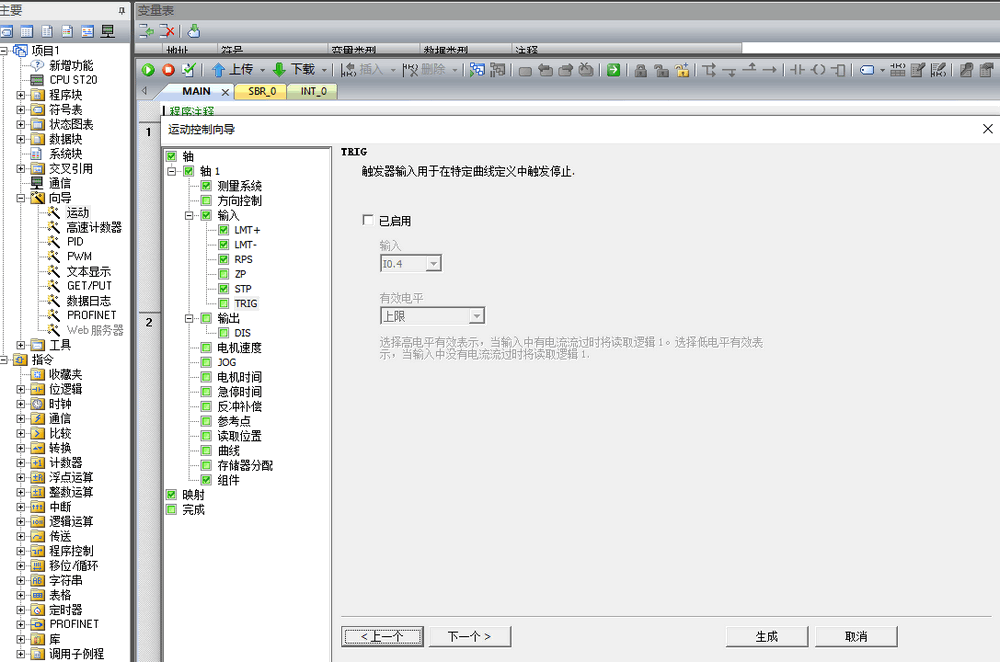
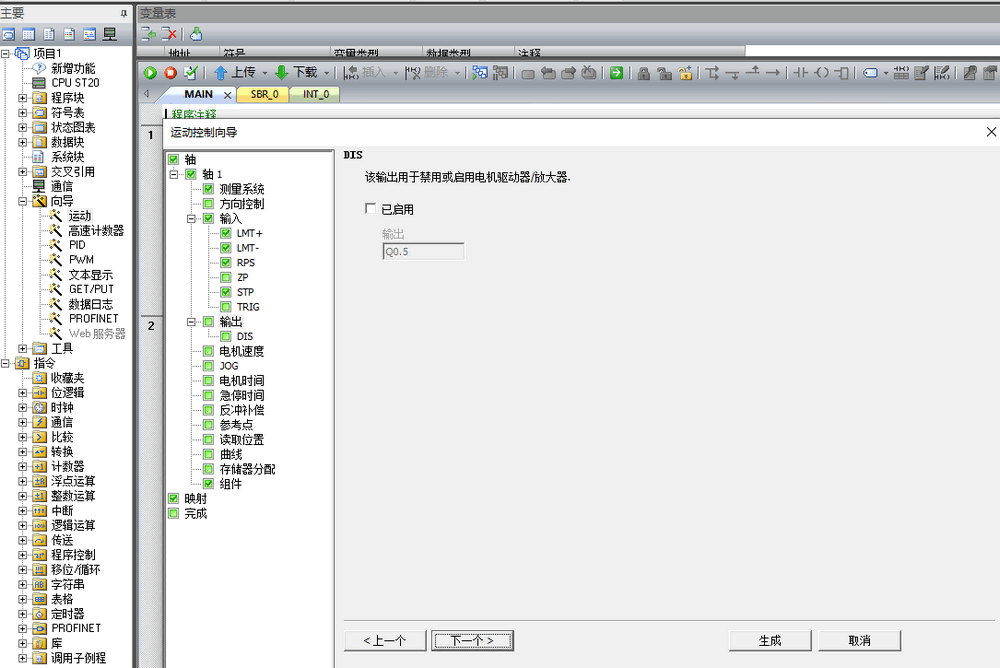
TRIG和DIS这两个可以不用管,在曲线的时候才能用的上。
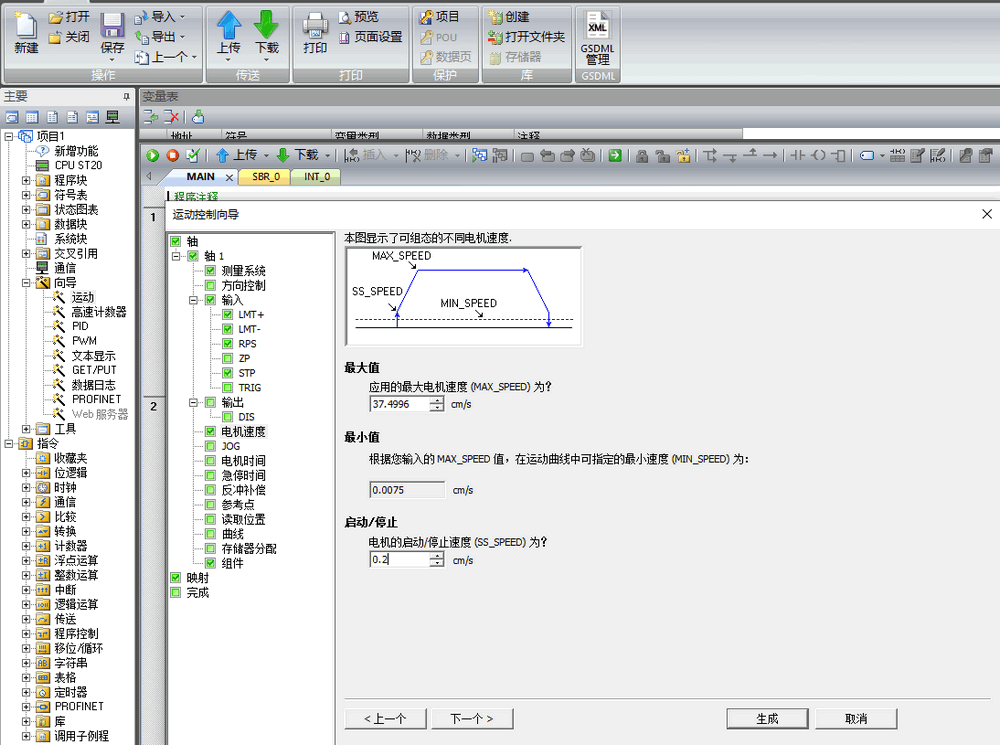
定义电机的最大速度37.4996cm/s;算法如下,最大频率是100KHz表示1秒发10万个脉冲,按照转一圈需要1600个脉冲,一圈走0.6c则可以算出来最大速度为: 100000 / 1600 * 0.6 = 37.5cm/s 最小速度,停止速度一般用默认值。
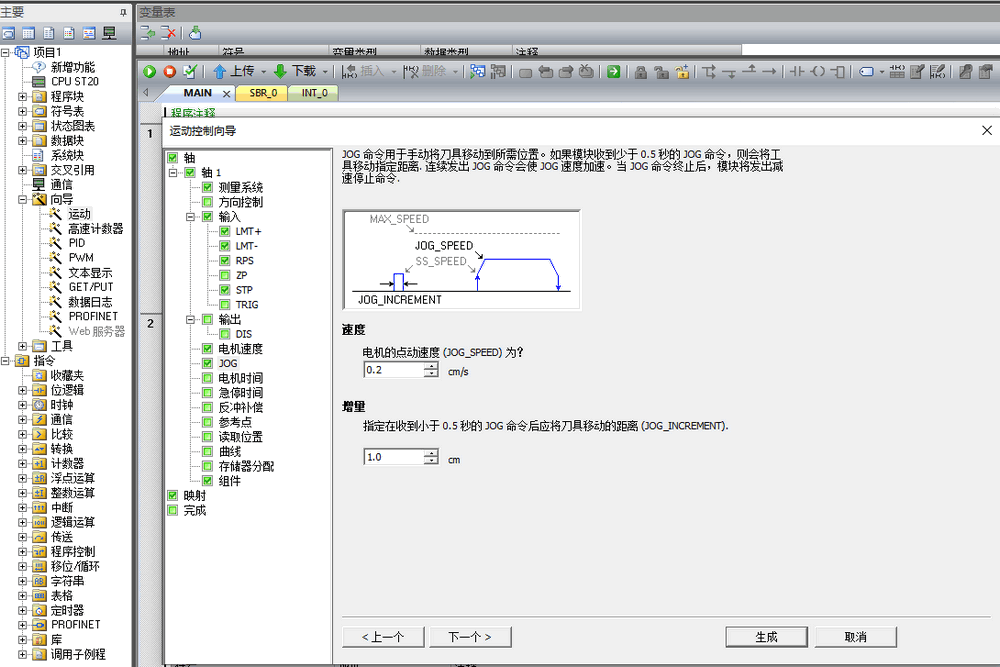
定义点动速度,用默认值即可。
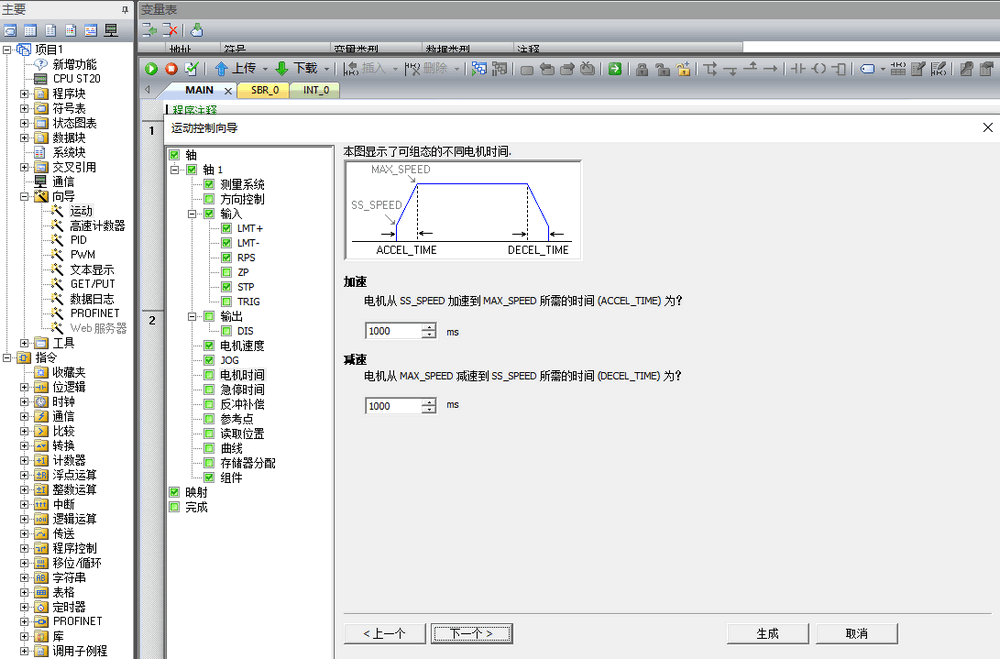
电机的加速时间:即从最小速度加速到最大速度所用的时间;电机的减速时间:即从最大速度到最小速度所用的时间;
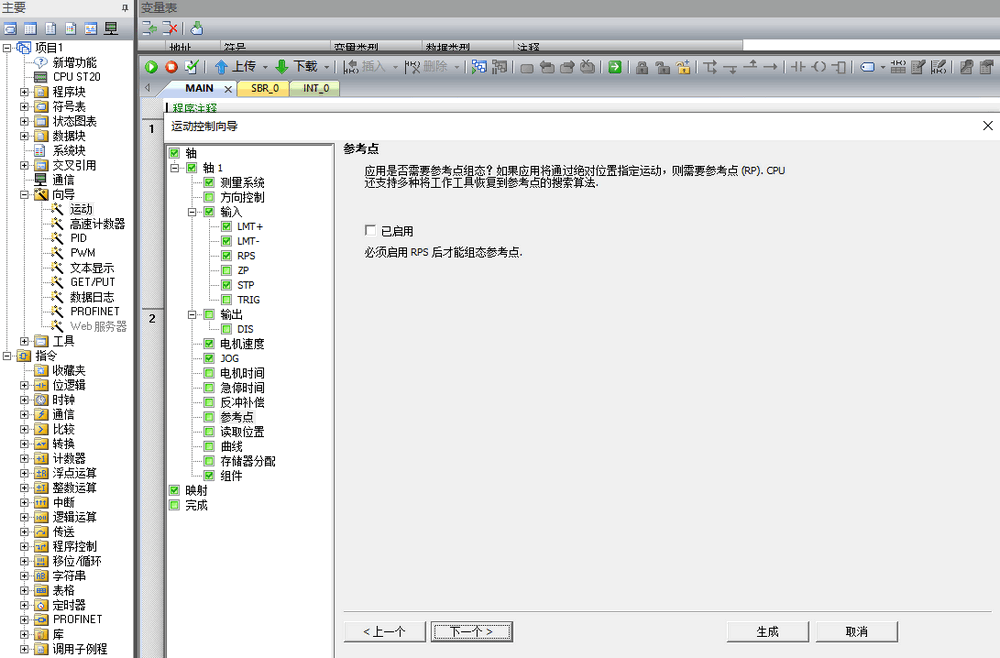
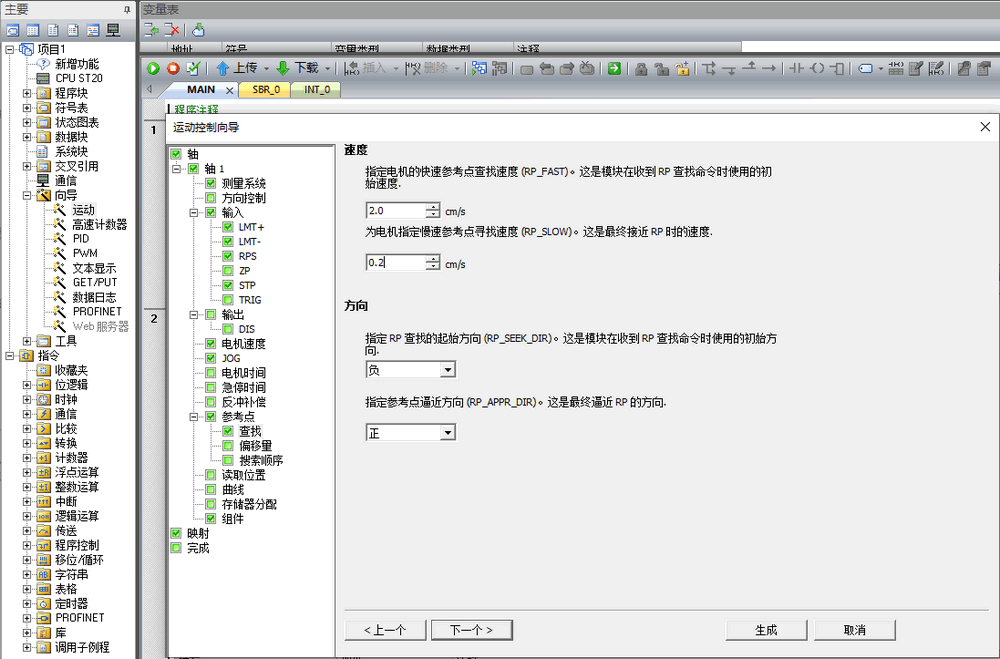
急停时间, 反冲补偿都按默认即可。在前面已经设定了参考点的开关是I0.2,所以现在和可以启动参考点功能。
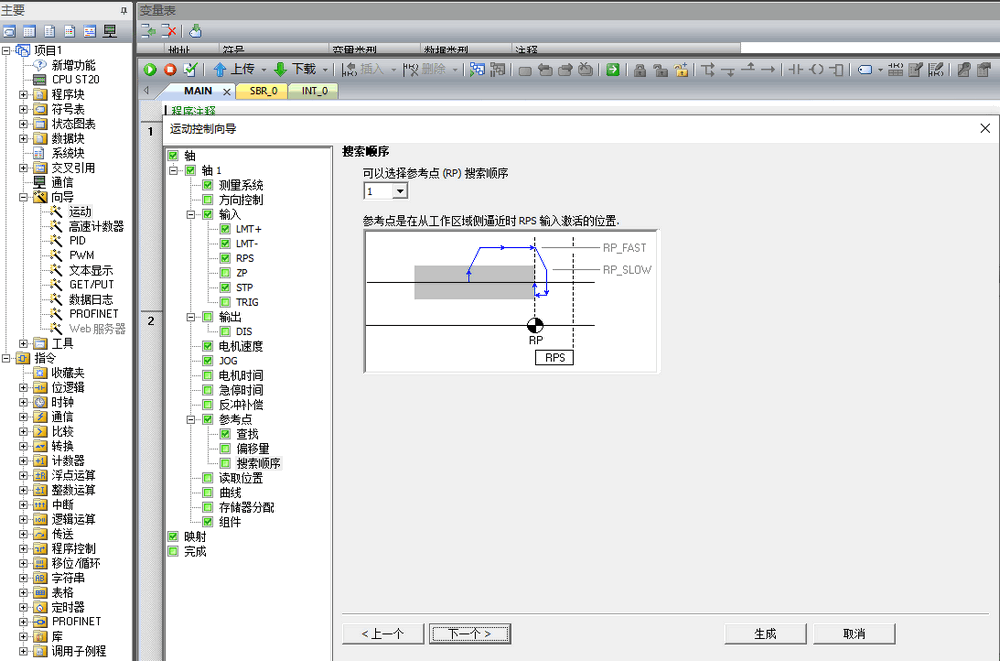
RP_FAST:正常的寻参速度;RP_SLOW:碰到原点限位时切换为爬行速度;方向:负:寻参的起始方向(默认向右是正),指定参考点逼近方向 正:检测到原点上升沿,立即减速,反向,到下降沿停止寻参。负,检测到原点上升沿,立即减速再继续向前,走到下降沿,再反向检测上升沿,再反向检测下降沿停止。
碰到原点限位的上升沿时,开始减速,减速到限位开关的下降沿时,变为反向,回到上升沿的位置
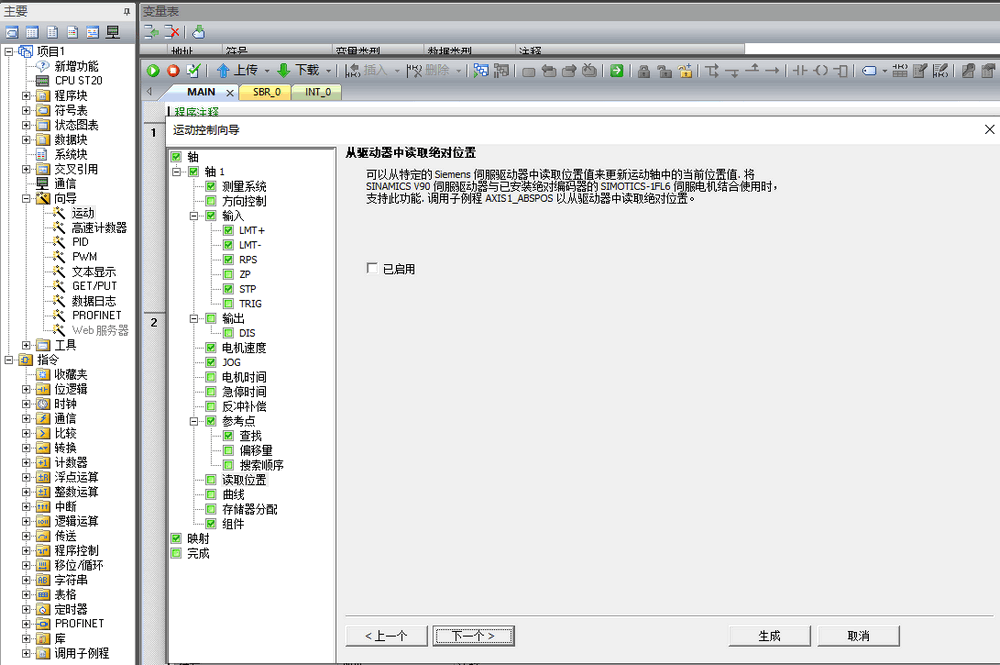
此选项不用考虑只有西门子的伺服才支持,默认不用选择。
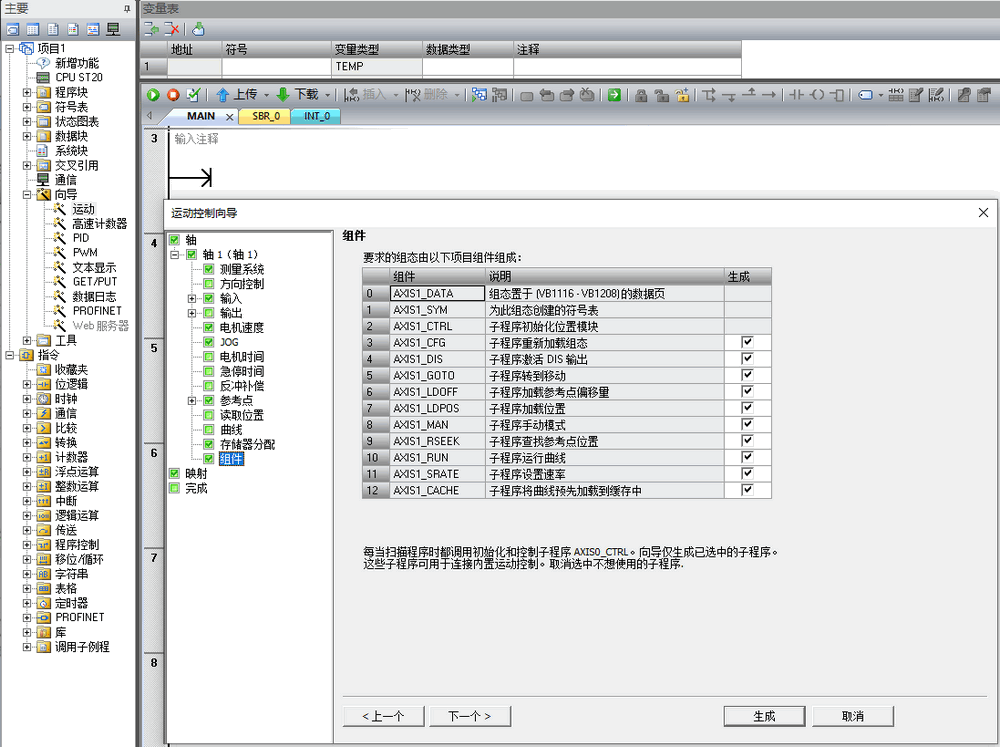
曲线设定好以后就不能修改了,所以先不设置。再按推荐分配库存储空间即可。
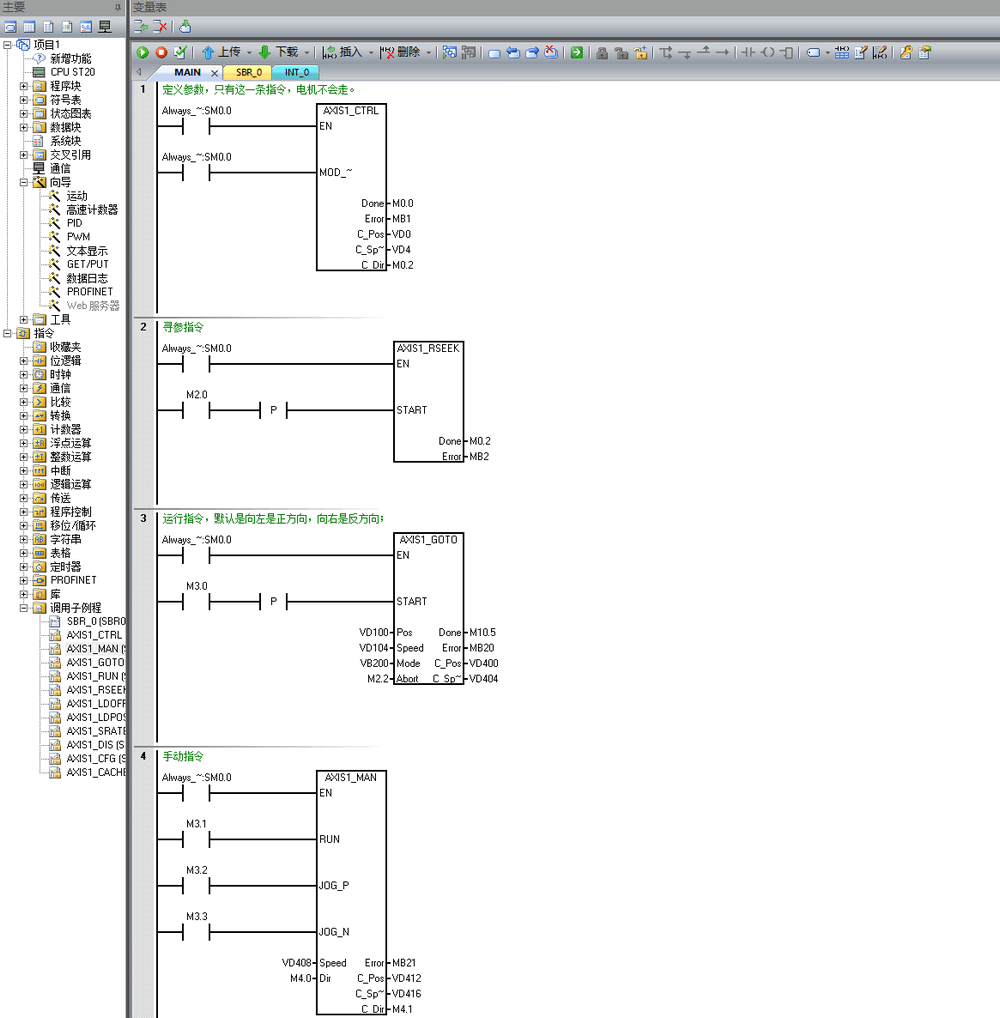
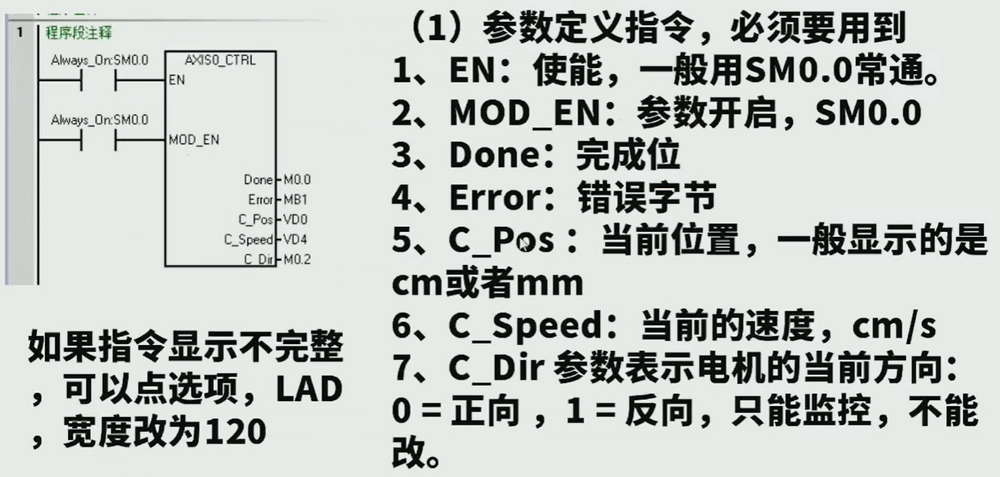
一般默认全部勾选,其实常用的指令有【2,5,8,9】CTRL:定义参数;GOTO:运动; MAN:手动;RSEEK:寻参指令;
参数定义指令
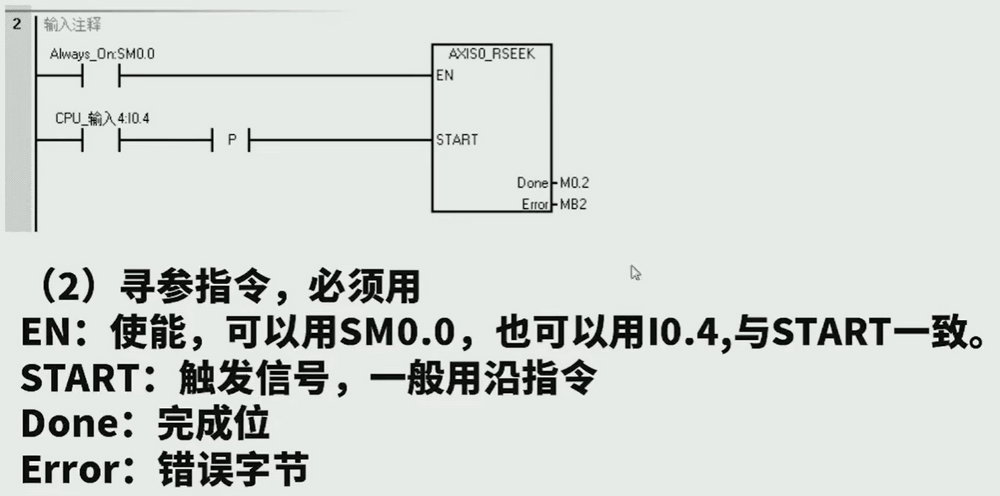
寻参指令
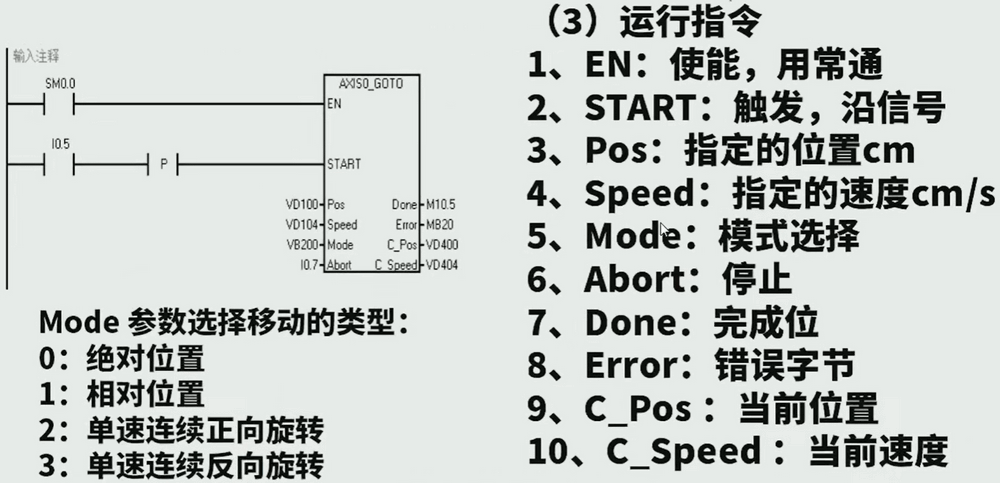
运行指令
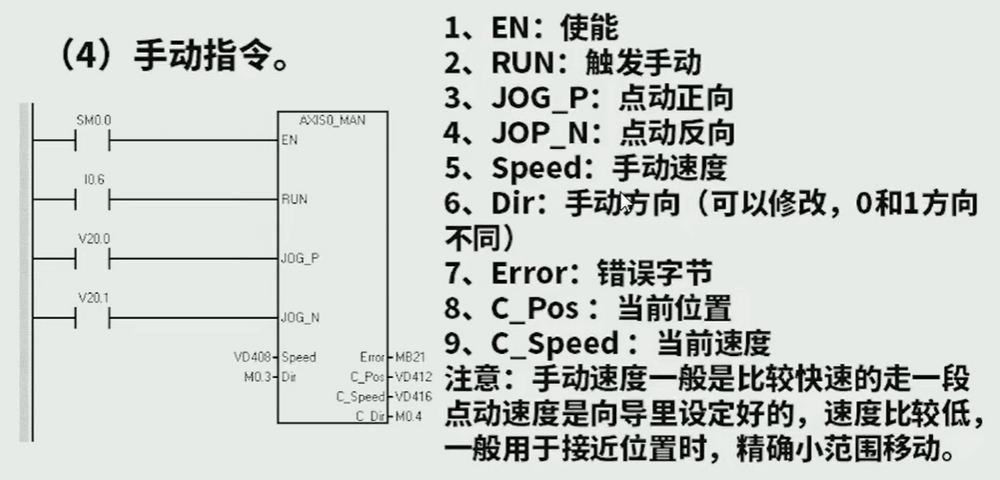
手动指令
代码实现如下图所示