通过工具中的PID向导生成PID子程序。
给定值的高低限是百分比,是给定值的取值范围,也可以用工程的实际数值表示。如果不想要微分时间可以调成0;
回路输入选项, 本例使用的是数字量PWM输出。
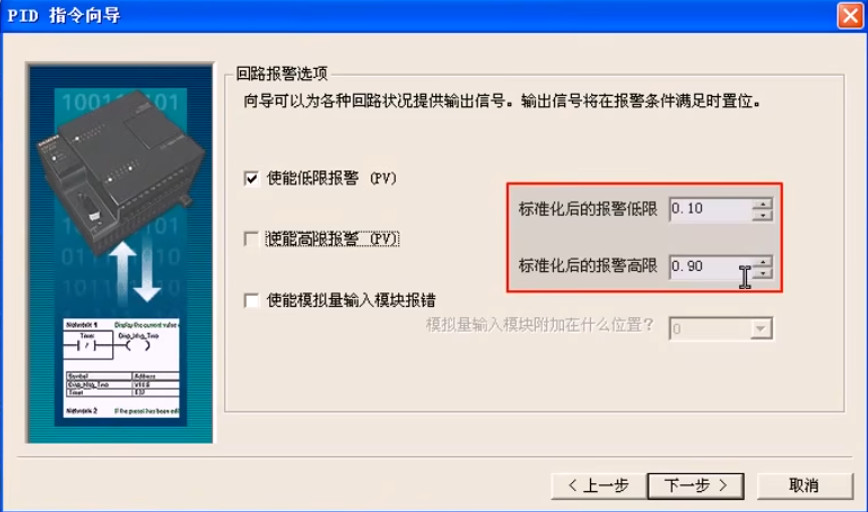
回路报警的高低限是百分比值;其中使能模拟量输入模块报错,得选择所在的位置,由于本PLC是自带的模拟量,所以不用选此项。
调用PID子程序
符号表中生成的详细地址
把标准化的过程变量vd0转化成实际温度值后给VD200;
保存编译并下载到PLC。 实例
要想使用PID自整定功能必须使用PID向导生成,将其下载并使PLC处于运行模式。
先选择PID手动调节,再更新PLC使新的参数起作用。
监视趋势图,改变PID参数使过程值与设定值接近时,并且输出没有不规律的变化,并最好处于控制中心附近,此时将手动切换到自动模式。单击开始自动调节。
当开始自动调节按钮又变回可点时说明自整定成功了。
将自整定的数据更新到PLC即可。
全部结束后最好从新下载一次整个项目,使数据保存在FLASH中。